معمولا عباراتی چون درایو کردن، تنظیم سرعت، راهاندازی نرم و کنترل دور الکتروموتور، در کارخانجات و مصارف صنعتی و هر جایی که الکتروموتور سه فاز و نیز تک فاز وجود دارد، زیاد شنیده میشود. اگر نگوییم تمام، اما بیشتر ماشین آلات صنعتی و دستگاههایی چون جرثقیلها، نوارهای نقاله، آسانسورها، فنها و پمپها با سرعتهای متغیر کار میکنند.
مزایای کلیدی کنترل دور موتور (RPM)
منظور از کنترل دور الکتروموتور، کنترل سرعت یا RPM آن است و هدف اصلی، افزایش کنترل بهینه روی فرایندهایی است که با موتور انجام میشود. در کنار آن میتوان به مزایایی چون صرفهجویی در انرژی مصرفی و کاهش سر و صدای موتور هم دست یافت. بنابراین کنترل دور را میتوان مهمترین موضوع مرتبط با الکتروموتورها دانست.

انواع روشهای کنترل موتور سه فاز
الکتروموتور های سه فاز القایی (اسنکرون) به دلیل بدنه محکم، خرابی و استهلاک بسیار پایین و کارایی عالی، از پر کاربرد ترین تجهیزات در صنایع مختلف هستند. سرعت چرخش این موتور ها مستقیما به دو عامل بستگی دارد: فرکانس برق ورودی و تعداد قطب های موتور. بر اساس همین رابطه، مهندسان برای تنظیم سرعت و کنترل دور این موتور ها در دستگاه های صنعتی، روش های مختلفی را توسعه داده اند.
تغییر در تعداد قطبها
میتوان با تغییر تعداد قطبها، سرعت الکتروموتور را تنظیم کرد. برای این کار بایستی اتصالات سیمپیچهای موتور را تغییر داد، یا تحریک مغناطیسی خارجی به موتور اعمال کرد. البته در این روش، گامهای کنترل سرعت محدود است.
تنظیم ولتاژ
در موتورهای القایی، گشتاور با مجذور ولتاژ رابطه مستقیم دارد. با کاهش ولتاژ ورودی (در فرکانس ثابت)، گشتاور موتور کاهش یافته و در نتیجه لغزش موتور افزایش مییابد که این امر منجر به کاهش سرعت دورانی میشود.
- ویژگیها: این روش برای کنترل محدود سرعت در بارهایی با گشتاور متغیر (مانند فنها و پمپهای کوچک) استفاده میشود.
تغییر فرکانس (استفاده از درایو فرکانس متغیر - VFD)
مؤثرترین و رایجترین روش کنترل دور موتورهای AC، تغییر فرکانس منبع تغذیه است. سرعت سنکرون موتور القایی مستقیما به فرکانس برق ورودی وابسته است؛ بنابراین با کاهش یا افزایش فرکانس، سرعت موتور نیز تغییر میکند. این کار توسط تجهیزی به نام اینورتر یا درایو فرکانس متغیر (VFD) انجام میشود.
درایو علاوه بر تغییر فرکانس، ولتاژ را نیز متناسب با آن تنظیم میکند تا موتور بتواند در سرعتهای مختلف، گشتاور مناسبی تولید کند. این ویژگی باعث میشود موتور بدون ضربه مکانیکی و با راهاندازی نرم کار کند. همچنین استفاده از VFD باعث کاهش مصرف انرژی، افزایش طول عمر تجهیزات و بهبود کنترل فرآیند میشود.
استفاده از چوک (سلف) سری
در این مدار سنتی، یک چوک یا سلف به صورت سری با سیمپیچهای استاتور موتور قرار میگیرد. امپدانس سلف باعث افت ولتاژ شده و ولتاژ مؤثر اعمالی به موتور کاهش مییابد که نتیجه آن افت سرعت است.
- بیشتر برای موتورهای کم توان استفاده میشود
- مدار ساده و هزینه کم
- کنترل سرعت دقیق نیست و راندمان کاهش مییابد
استفاده از مقاومت در روتور
این روش در موتورهای القایی روتور سیمپیچیشده کاربرد دارد. در این موتورها میتوان با اضافه کردن مقاومت خارجی به مدار روتور، مقدار جریان و لغزش موتور را تغییر داد و سرعت آن را کنترل کرد.
- مزایا: امکان ایجاد گشتاور راهاندازی بسیار بالا؛ ایدهآل برای بارهای سنگین صنعتی نظیر جرثقیلها و بالابرها.
- معایب: راندمان پایین، زیرا بخش قابلتوجهی از انرژی الکتریکی در مقاومتها به صورت حرارت (تلفات اهمی) هدر میرود.
استفاده از اتوترانس
در این شیوه از یک اتوترانسفورماتور برای کاهش ولتاژ تغذیه موتور در زمان راهاندازی و کار استفاده میشود. کاهش ولتاژ به افت گشتاور و در نتیجه کاهش سرعت میانجامد.
- ویژگیها: تنظیم ولتاژ میتواند به صورت پلهای یا پیوسته باشد. تلفات حرارتی آن نسبت به روش مقاومت سری به مراتب کمتر است.
- وضعیت فعلی: به دلیل ابعاد فیزیکی بزرگ، هزینه بالای تجهیزات، و عدم امکان کنترل دقیق و وسیع سرعت، این روش امروزه منسوخ شده و درایوهای فرکانس متغیر (VFD) به طور کامل جایگزین آنها شدهاند.
روش قطب متغیر
در این روش با تغییر تعداد قطبهای استاتور سرعت موتور تغییر میکند. از آنجا که سرعت سنکرون با تعداد قطبها رابطه معکوس دارد، افزایش تعداد قطبها باعث کاهش سرعت موتور میشود.
- معمولا با تغییر اتصال سیمپیچهای استاتور انجام میشود
- موتور میتواند در چند سرعت مشخص کار کند
- در تجهیزاتی مانند فنها و پمپها کاربرد دارد
انواع روشهای کنترل موتور تک فاز
بیشتر موتورهای AC از نوع القایی (یا آسنکرون) قفس سنجابی هستند. برای به حرکت درآوردن این نوع موتورها بایستی میدان الکترومغناطیسی دوار در اطراف روتور آنها ایجاد شود. برای ایجاد این میدان دوار و گشتاور اولیه در الکتروموتور تک فاز، لازم است علاوه بر سیمپیچ اصلی، یک سیمپیچ کمکی یا راهانداز هم در استاتور پیچیده میشود. بسته به اتصال این سیمپیچها به یکدیگر و نوع کاربرد موتور، روشهای مختلفی برای راهاندازی الکتروموتور تک فاز وجود دارد:
- استفاده از سیمپیچ کمکی و کلید گریز از مرکز
- استفاده از سیمپیچ کمکی، خازن موقت و کلید گریز از مرکز
- استفاده از سیمپیچ کمکی، خازن دائم و کلید گریز از مرکز
- استفاده از سیمپیچ کمکی، خازن دائم، خازن موقت و کلید گریز از مرکز
- استفاده از قطب چاکدار
اما برای کنترل دور الکتروموتور تک فاز القایی گزینه زیادی پیش رو نداریم. برای این منظور دو روش معرفی میشود:
روش تغییر مقاومت استاتور (روش سنتی)
روش مقاومتی: در این روش که یکی از شیوههای قدیمی برای کنترل دور الکتروموتورهای القایی است، مقاومتهای متغیر بهصورت سری در مدار سیمپیچ استاتور قرار میگیرند. با افزایش مقدار مقاومت توسط اپراتور، افت ولتاژ بیشتر شده و ولتاژ مؤثر پایانههای موتور کاهش مییابد. از آنجا که گشتاور موتور با مجذور ولتاژ رابطه مستقیم دارد ، افت ولتاژ استاتور باعث افزایش لغزش و در نتیجه کاهش سرعت (RPM) میشود.
استفاده از درایو یا اینورتر فرکانس متغیر (VFD)
بهینهترین روش برای کنترل سرعت در صنعت مدرن، استفاده از اینورتر یا درایو فرکانس متغیر (VFD) است. اینورتر با تغییر همزمان فرکانس و ولتاژ، اجازه میدهد سرعت الکتروموتور را از صفر تا چندین برابر دور نامی، بدون کاهش گشتاور و با دقت بسیار بالا تنظیم کنید.
چرا استفاده از VFD بر روشهای دیگر برتری دارد؟
-
کاهش چشمگیر مصرف برق: با تنظیم دور موتور متناسب با نیاز بار، انرژی هدر نمیرود (بهویژه در پمپ و فن).
-
راهاندازی و توقف نرم (Soft Start/Stop): حذف ضربههای مکانیکی ناشی از استارت ناگهانی، که باعث افزایش طول عمر گیربکس و اتصالات میشود.
-
حفاظت کامل الکتریکی: درایو از موتور در برابر خطاهایی مثل اضافه جریان، نوسان ولتاژ و دو فاز شدن محافظت میکند.
کنترل سرعت در موتورهای یونیورسال (کاربردهای خانگی و نیمهصنعتی)
موتورهای یونیورسال نوعی خاص و پرکاربرد از الکتروموتورها هستند که قابلیت کارکرد با هر دو منبع تغذیه جریان متناوب (AC) و جریان مستقیم (DC) را دارند. برخلاف موتورهای القایی که سرعتشان به فرکانس شبکه گره خورده است، بارزترین مزیت موتورهای یونیورسال گشتاور راهاندازی بسیار بالا و امکان کنترل آسان سرعت در بازههای فراتر از ۳۰۰۰ دور بر دقیقه است.
نحوه تنظیم سرعت از نظر فنی:
در ساختار موتور یونیورسال، سیمپیچهای میدان (استاتور) بهصورت سری با آرمیچر (روتور) از طریق زغال (جاروبک) و کلکتور متصل میشوند. برای کنترل دور این موتورها، نیازی به تغییر فرکانس نیست؛ بلکه تنظیم سرعت مستقیماً از طریق تغيير ولتاژ ورودی انجام میگیرد. رایجترین روشهای اجرای آن عبارتند از:
- روش خروجیهای چندگانه از استاتور (Tapped Field): با تغییر محل اتصال خروجیهای سیمپیچ میدان، شدت میدان مغناطیسی ضعیف یا قوی شده و دور موتور تغییر میکند .
- استفاده از مدارهای الکترونیکی (دیمر/ترایاک): با برش زاویه فاز ولتاژ ورودی توسط قطعات نیمههادی مانند ترایاک (Triac)، ولتاژ مؤثر (RMS) کاهش یافته و سرعت موتور با دقت بالایی کنترل میشود.

انواع روشهای کنترل دور موتور AC و DC
در دنیای اتوماسیون صنعتی، انتخاب بین موتورهای AC و DC معمولا بر اساس نیاز به دقت کنترل دور و هزینههای نگهداری صورت میگیرد. اگرچه امروزه موتورهای AC به همراه اینورتر سهم بزرگی از بازار را تسخیر کردهاند، اما موتورهای DC هنوز در کاربردهایی که نیاز به گشتاور بالا در سرعتهای پایین و کنترل بسیار دقیق دارند، بیرقیب هستند. تفاوت اصلی در روش کنترل این دو نهفته است: در موتورهای AC، کنترل دور عمدتا از طریق تغییر فرکانس انجام میشود، در حالی که در موتورهای DC، تنظیم سرعت با تغییر ولتاژ آرمیچر یا جریان میدان صورت میگیرد.
کنترل دور موتور AC
در الکتروموتورهای AC تک فاز و سه فاز، تعداد قطبها ثابت و مشخص است. بنا به فرمول زیر، سرعت موتور با فرکانس تغذیه رابطه مستقیم و با تعداد قطبهای موتور رابطه معکوس دارد:
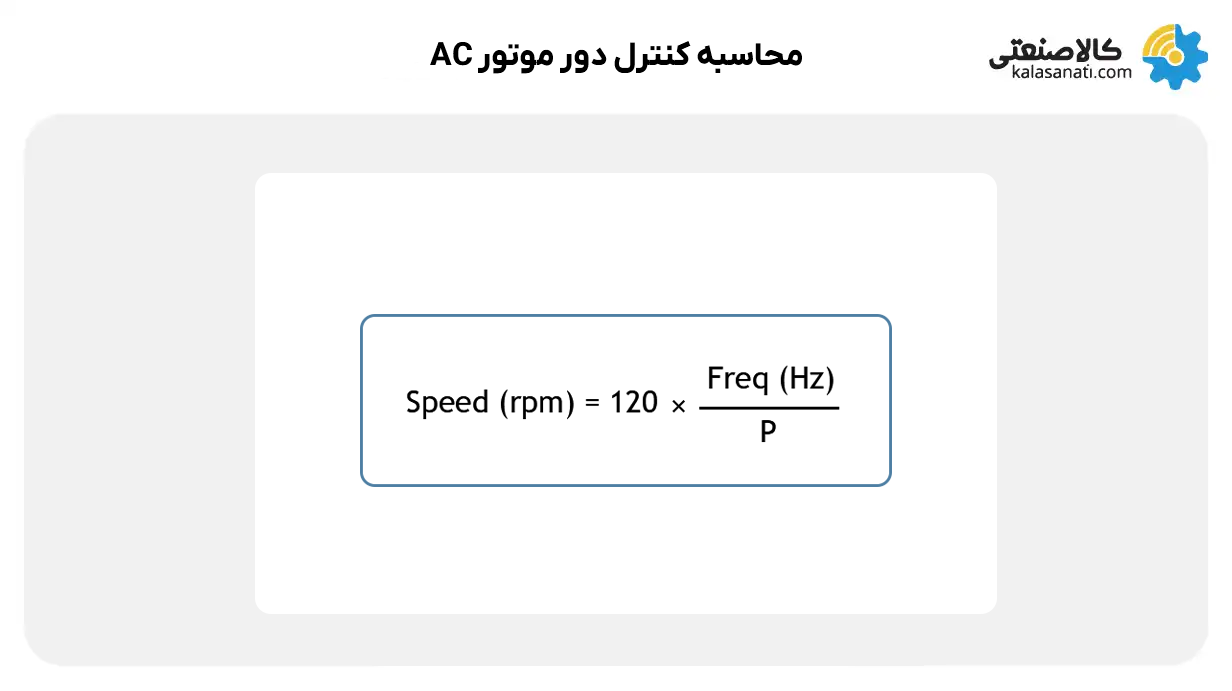
طبق این رابطه، در موتورهای 2، 4، 6 و 8 قطبی، سرعت سنکرون موتور به ترتیب 3000، 1500، 1000 و 750 دور بر دقیقه (RPM) خواهد بود. آسانترین و عملیترین راه برای تغییر سرعت موتور، تغییر فرکانس اعمالی خواهد بود. برای این منظور از دستگاهی به نام اینورتر یا درایو (VFD) استفاده میشود.
اینورتر برای کنترل دور موتور، از مدهای کنترلی مختلفی استفاده میکند:

1) مد کنترلی اسکالر (V/F):
مد کنترلی ولتاژ به فرکانس، پرکاربردترین مد کنترلی موتورهای القایی است که در آن نسبت ولتاژ به فرکانس در سرعتهای مختلف موتور، ثابت نگه داشته میشود. گفتیم که سرعت موتور، نسبت مستقیم با فرکانس آن دارد. چنانچه اندازه ولتاژ اعمال شده به موتور ثابت بماند و فرکانس آن کاهش یابد، شار مغناطیسی به مقدار زیادی افزایش و مدار مغناطیسی، اشباع شود. در این حالت امکان سوختن موتور وجود دارد.
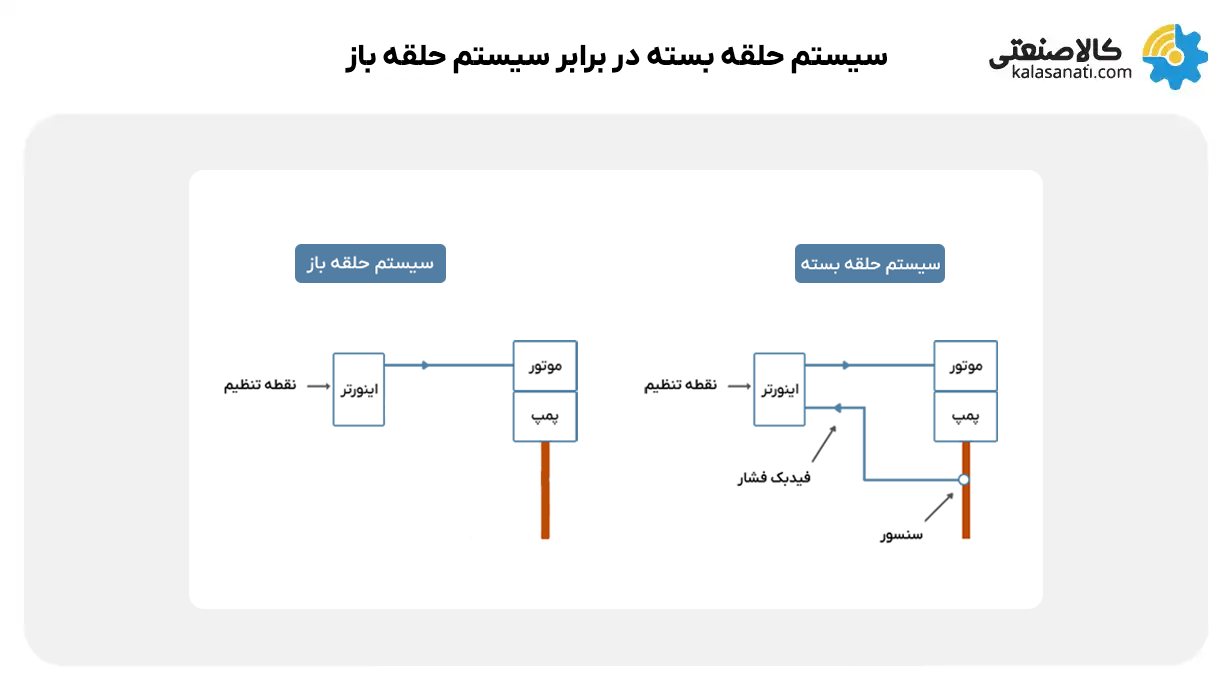
اگر نسبت ولتاژ به فرکانس، ثابت نگه داشته شود، قدرت میدان مغناطیسی مستقل از سرعت موتور، ثابت میماند. این مد کنترلی مناسب کاربردهایی است که نیاز به گشتاور بالایی ندارند مانند فن، پمپ و نوار نقاله. همچنین در مد کنترلی ولتاژ به فرکانس، اینورتر از خروجی فیدبک نمیگیرد و بنابراین برای کاربردهای دقیق مناسب نیست. برای مثال اگر درایو فرکانس 27 هرتز را به موتور اعمال کند، نمیتواند اطمینان یابد که آیا واقعا موتور به این فرکانس رسیده یا خیر.
2) مد برداری حلقه باز (بدون سنسور یا SVC):
در این مد کنترلی، پردازنده اینورتر بر اساس روابط ریاضی و پارامترهایی که از پیش برایش تعریف شده، از جریان موتور نمونهگیری و اصلاحات لازم را اعمال میکند. در این حالت چون از مقدار واقعی خروجی (سرعت موتور)، فیدبکی به اینورتر داده نمیشود بایستی پارامترهای درایو دقیق و صحیح تنظیم شود تا امکان خطا کمتر شود. در این حالت، ولتاژ و فرکانس مستقل از هم کنترل میشوند، بنابراین میتوان در فرکانسهای پایین، ولتاژ بالا و نیز گشتاور بالا ایجاد کرد.
این حالت برای بارهای سنگین مانند جرثقیل، بالابر و اکسترودر که در لحظه راهاندازی یا در سرعت پایین نیاز به گشتاور بالا دارند، مناسب است. همچنین در کاربردهایی که بار ثابت است و نیاز به دقت و کنترل پیچیدهای ندارد، روش کنترلی حلقه باز، یک گزینه مناسب و اقتصادی است.
3) مد برداری حلقه بسته (کنترل برداری یا VC):
دیدیم که در سیستم حلقه باز، درایو به طور مداوم به موتور خروجی میدهد اما نمیتواند از عملکرد صحیح آن اطمینان یابد. اما اگر یک انکدر (سنسور) به موتور وصل شود، سرعت دقیق موتور برای درایو معلوم میشود. با اضافه شدن سنسور، یک فیدبک به سیستم اضافه میشود و در نتیجه سیستم حلقه بسته خواهیم داشت. اینورتر سرعت واقعی موتور را در الگوریتم کنترلی خود وارد، و خروجی لازم را برای رسیدن به سرعت و گشتاور مطلوب، به موتور ارسال میکند.
در کاربردهایی مانند ماشینهای CNC و سیستمهای نوار نقاله که به کنترل دقیق گشتاور و سرعت نیاز است، از حالت کنترلی برداری یا حلقه بسته استفاده میشود.
کنترل دور موتور DC
در مواقعی که نیاز به کنترل سرعت دقیق باشد میتوان از موتورهای DC استفاده کرد. این موتورها به آسانی و به شکلی بهینه، امکان ایجاد حرکت دورانی را از حالت توقف تا سرعت کامل، فراهم میکنند.
در موتورهای DC سری که میدان مغناطیسی با آرمیچر سری است، با افزایش یا کاهش ولتاژ اعمالی به مدار، سرعت نیز تغییر میکند. اما در موتورهای DC شنت، کنترل سرعت با تغییر ولتاژ اعمالی به آرمیچر، به کمک مقاومت متغیر یا SCR انجام میشود.
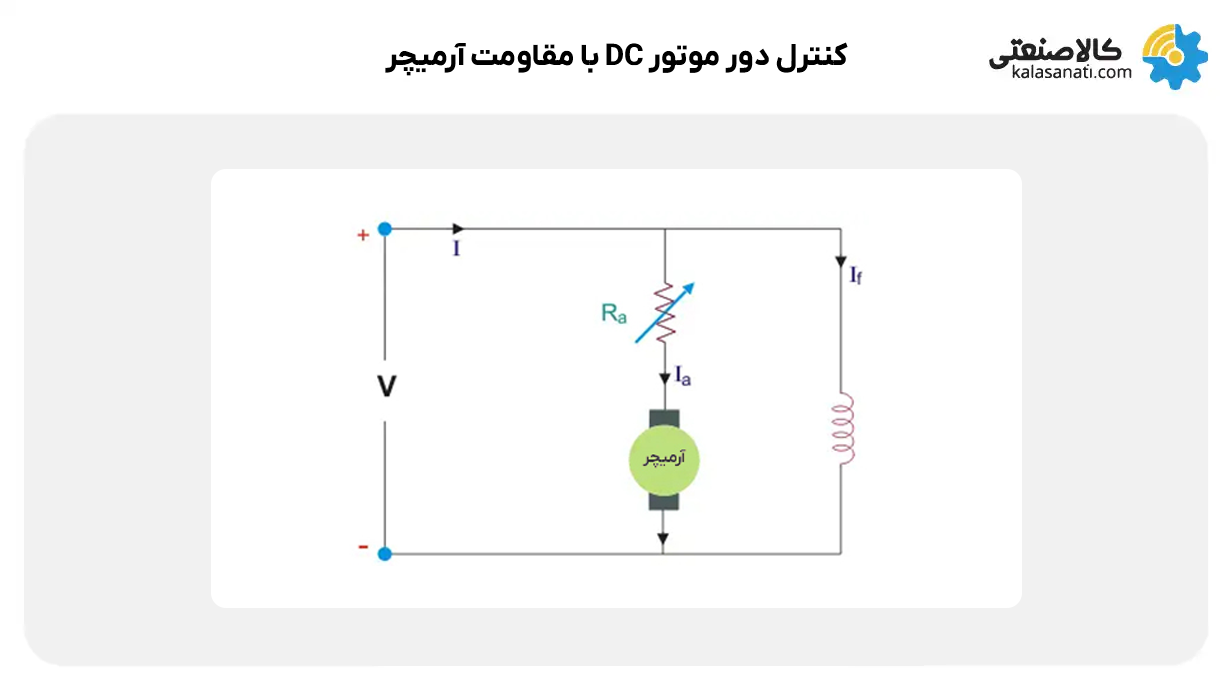
روشهای مقاومت آرمیچر و شنت، جزو کمهزینهترین راههای کنترل دور موتور DC به شمار میروند؛ اما بازدهی آنها نسبت به سایر روشها پایینتر است و مقدار زیادی از توان موتور در مقاومتهای متغیر تلف میشود. در این روشها ممکن است موتور در سرعتهای پایین دچار افت توان شود و حتی از کار بیفتد.
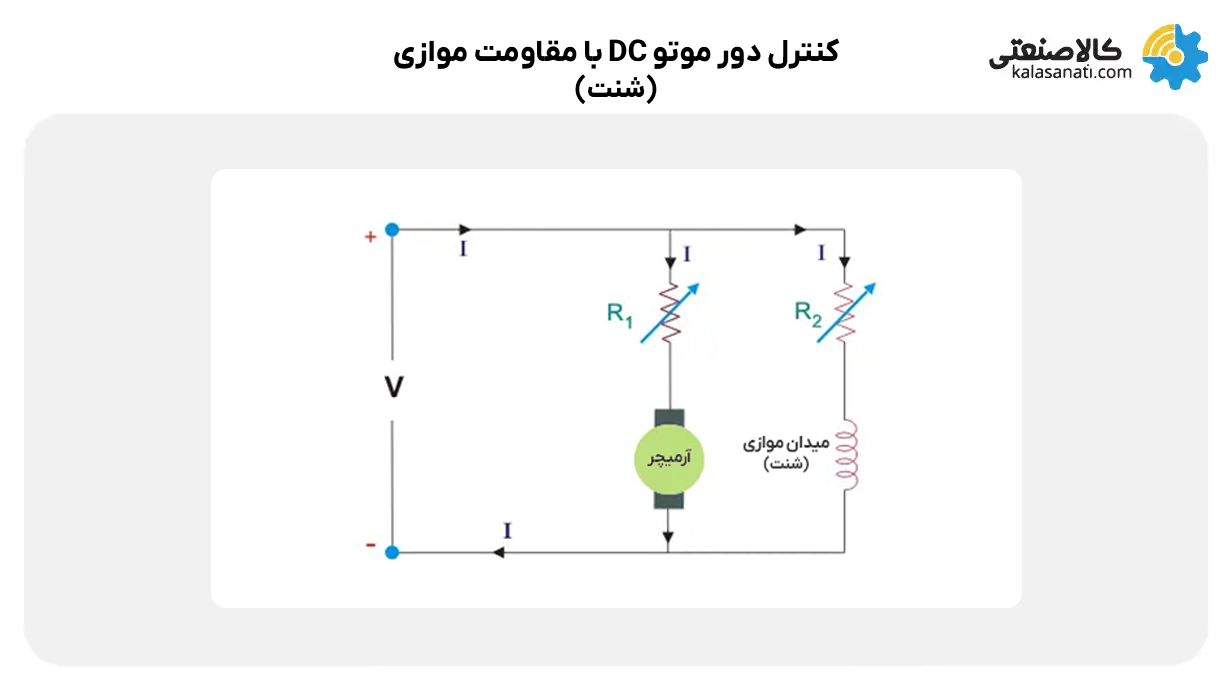
از روشهای کنترل سرعت موتور DC با مقاومت آرمیچر و شنت، در کاربردهای ساده و موتورهای کمتوان استفاده میشود. برای کاربردهای صنعتی و پیشرفتهتر، باید از روشهای دیگر کنترل دور موتور DC استفاده کرد.
جمعبندی روشهای کنترل دور الکتروموتور و مدهای درایو
برای آنکه بتوانیم از الکتروموتورها استفاده کنیم بایستی بتوانیم سرعت یا دور آنها را کنترل کنیم. منظور از کنترل دور این است که بتوانیم هر زمان که لازم است یک موتور را راهاندازی کنیم، سرعت آن را زیاد یا کم کنیم و آن را خاموش کنیم.
دیدیم که موتورهای AC، تک فاز و سه فاز برای راهاندازی نیاز به یک میدان دوار دارند.
برای کنترل دور موتور تک فاز دو روش وجود دارد: روش مقاومتی و استفاده از یک مقاومت متغیر در سیمپیچ استاتور؛ و استفاده از اینورتر. روش مقاومتی به علت تلفات و گرمایی که ایجاد میکند روش مناسبی نیست. از طرفی با توجه به کمیاب بودن اینورتر تک فاز به تک فاز و بصرفه نبودن آن، در صورت امکان بهتر است موتور تک فاز را با یک الکتروموتور سه فاز جایگزین کنیم.
برای کنترل دور موتور سه فاز نیز با وجود روشهای مختلف، استفاده از اینورتر رایجترین و بهینهترین گزینه است.
اینورترها به سه روش کنترلی، سرعت یا دور موتورها را کنترل میکنند:
- مد کنترلی اسکالر (V/F)
- مد کنترلی حلقه باز (SVC)
- مد کنترلی حلقه بسته (برداری یا VC).
برای کنترل دور دقیق میتوان از موتورهای DC هم استفاده کرد. برای کاربردهای ساده و توانهای کم، میتوان از روش مقاومت آرمیچر و مقاومت شنت استفاده کرد که البته برای کاربردهای پیشرفته مناسب نیست و بایستی از روش های دیگری که در مقاله معرفی شده، کمک گرفت.
کنترل دور الکتروموتور برای چیست؟
کنترل دور الکتروموتور که در قالب کلماتی چون درایو نمودن موتور ،راه اندازی نرم موتور ،تنظیم سرعت موتور می آید در کارخانجات و مصارف صنعتی و هر جایی که الکتروموتور سه فاز وجود دارد معنادار میشود. چرا که راه اندازی موتورهای سه فاز همواره جزو مواردی هستند که صنایع را به خود درگیر کرده اند کنترل دور الکتروموتور یا همان اینورتر ها به لحاظ تنوعی که دارند و نیز تنظیمات متفاوتی که دارند ، به راحتی توانسته اند این معضل را حل کنند.
کنترل دور به روش تبدیل پتانسیل به فرکانس چگونه است؟
از جمله روشهای ساده جهت کنترل دور الکترو موتورهای ac همواره ثابت نگهداشتن نسبت تبدیل پتانسیل به فرکانس می باشد. لازم به توضیح است که روش مذکور از آن دسته مواردی است که در کارخانجات و مصارف صنعتی مکرر استفاده می شود. از مزیت های این مدل راه اندازی، راحت بودن آن و اینکه از نوع اسکالر است ،یعنی به طور حلقه باز(open loop) دارای ماندگاری قابل قبولی است. در عوض ایرادی که میتوان از این روش گرفت، باید بگوییم که برای مصارف و ساختارهای نیازمند پاسخ سریع مطلوب نمی باشد.