الکتروموتور چیست؟
الکتروموتور (Electrical Motor) یکی از انواع ماشینهای الکتریکی است که نیروی الکتریکی را به مکانیکی تبدیل مینماید. عکس این عمل، یعنی تبدیل انرژی مکانیکی به الکتریکی توسط ژنراتور یا دینام صنعتی انجام میگیرد. ساختمان کلی این دو ماشین الکتریکی، شباهت بسیار زیادی به هم دارد؛ به همین علت، الکتروموتور را با نامهای دینام صنعتی و موتور الکتریکی نیز میشناسند.
عملکرد اکثر الکتروموتورها بر مبنای اصول الکترومغناطیس است. مهمترین اصل در این موتورها این است که به جسم حامل جریان القایی که درون یک میدان مغناطیسی قرار دارد، نیروی مکانیکی اعمال میشود (قانون نیروی لورنتز). این نیرو بر خطوط میدان مغناطیسی و جهت جریان جسم عمود بوده و جهت آن از طریق قانون دست راست به دست میآید. این نیروی مکانیکی میتواند بهصورت دوار (Rotary) و یا خطی (Linear) باشد؛ البته، الکتروموتور دوار نسبت به موتورهای خطی رایجتر بوده و در کاربردهای بیشتری مورداستفاده قرار میگیرد.
الکتروموتور چه شباهت یا تفاوتی با موتور برق دارد؟
الکتروموتور و موتور برق دو دستگاه مشابه هستند که هرکدام برای تبدیل انرژی به انرژی الکتریکی یا مکانیکی استفاده میشوند، اما تفاوتهایی اساسی در کاربرد و عملکرد دارند:
کاربرد: الکتروموتور بیشتر برای تبدیل انرژی الکتریکی به انرژی مکانیکی استفاده میشود و در دستگاههایی مانند پمپها، فنها، کمپرسورها و ماشینآلات صنعتی کاربرد دارد. موتور برق یا ژنراتور برق، انرژی مکانیکی را به انرژی الکتریکی تبدیل میکند و بیشتر برای تأمین برق در مواقع اضطراری یا در مکانهایی که دسترسی به برق شهری ندارید، استفاده میشود.
عملکرد: الکتروموتور برای راهاندازی و حرکت دستگاههای مختلف به کار میرود، مانند سیستمهای تهویه، بالابرها و دیگر تجهیزات صنعتی. موتور برق یا ژنراتور، برق تولید میکند و آن را به دستگاههای برقی انتقال میدهد، بهویژه در مواردی که نیاز به برق در مکانهای دورافتاده یا در شرایط اضطراری باشد.
نوع انرژی: الکتروموتور معمولاً از برق شهری برای کارکرد خود استفاده میکند. موتور برق نیاز به سوخت (موتور برق بنزینی، گازوئیلی یا گازی) برای تولید برق دارد و خود بهعنوان منبع انرژی برای سایر دستگاهها عمل میکند. بهطور کلی، الکتروموتور انرژی الکتریکی را به حرکت مکانیکی تبدیل میکند، در حالی که موتور برق انرژی مکانیکی را به انرژی الکتریکی تبدیل میکند.
اگر به دنبال یک محصول مناسب هستید، پیشنهاد ما به شما موتور برق لانسین است؛ که کیفیت و قیمت مناسبی دارد.
انواع الکتروموتور
الکتروموتورها را باتوجهبه عوامل مختلفی مانند نوع منبع تغذیه، ساختار، کاربرد، ولتاژ ورودی، توان و … به انواع مختلفی تقسیمبندی میکنند. یکی از مهمترین عاملها برای تقسیمبندی انواع الکتروموتور، نوع جریان ورودی به آنها است. برایناساس انواع دینام صنعتی به دو دسته اصلی تقسیم میشوند:
- الکتروموتور جریان مستقیم (DC)
- الکتروموتور جریان متناوب (AC)
هریک از این دو گروه شامل طیف وسیعی از موتورها با ویژگیها و کاربردهای متفاوت میشوند.
الکتروموتور جریان مستقیم
ابتداییترین نسخه الکتروموتور، نوعی موتور جریان مستقیم (DC) بود که توسط مایکل فارادی اختراع شد. در الکتروموتور دی سی از برهمکنش میدانهای مغناطیسی ثابت و متغیر نیروی گشتاور چرخشی تولید شده و آرمیچر به چرخش در میآید. میدان مغناطیسی ثابت توسط آهنربای دائمی یا سیمپیچهای استاتور و میدان مغناطیسی متغیر توسط جریان الکتریکی سیمپیچهای آرمیچر ایجاد میشود.
موتورهای DC از نظر ساختار به دو دسته تقسیم میشوند:
- الکتروموتور DC براش دار (Brushed DC Motor)
- الکتروموتور DC بدون براش (Brushless DC Motor)
موتور DC براش
موتورهای DC براش از دو قطعه کربنی یا گرافیتی به نام جاروبک برای برقراری اتصال الکتریکی منبع تغذیه به سیمپیچهای روتور استفاده میکنند.
با چرخش روتور، کموتاتور نیز به چرخش درآمده و جاروبکها به طور مداوم روی آن لغزیده و جهت جریان را در سیمپیچهای روتور تغییر میدهند. این تغییر جهت جریان، دائماً قطبیت میدان مغناطیسی روتور را تغییر داده و در نتیجه برهمکنش این میدان و میدان مغناطیسی استاتور، نیروی گشتاور چرخشی ایجاد میشود. برسهای موتور پس از حدود 10000 ساعت کارکرد فرسوده شده و باید تعویض شوند.
همچنین سایش مداوم جاروبکها روی کموتاتور باعث ایجاد جرقه، افزایش مقاومت الکتریکی و کاهش راندمان موتور میشود؛ بنابراین، استفاده از موتورهای DC براش دار برای تجهیزاتی که بهصورت مداوم کار میکنند، مانند فنها، غیرمنطقی است.
موتور DC براشلس
موتور دی سی براشلس (BLDC) بدون نیاز به قطعاتی مانند برسها و کموتاتور کار میکند. در این موتورها روتور به آهنربای دائمی مجهز شده و سیمپیچها درون استاتور قرار دارند. در واقع موتورهای براشلس دارای سیمپیچهای ثابت و آهنربای چرخان هستند؛ در نتیجه، هیچ نوع اصطکاکی بین روتور و استاتور در این موتور وجود ندارد و بهرهوری کلی موتور افزایش مییابد.
موتورهای براشلس با استفاده از کنترلکنندههای الکترونیکی و بر اساس بازخورد موقعیت روتور از سنسورها، جریان سیمپیچهای استاتور را مدیریت میکنند. موتورهای DC بهواسطه کنترلپذیری بالایی که دارند، در صنایع مختلفی مورداستفاده قرار میگیرند. این موتورها را میتوان فوراً راهاندازی، متوقف و معکوس نمود که عامل بسیار مهمی برای کنترل عملکرد تجهیزات به شمار میآید.
الکتروموتور جریان متناوب یا AC
الکتروموتورهای جریان متناوب یا AC استفادههای گستردهای در صنایع مختلف دارند. این نوع الکتروموتورها با استفاده از جریان متناوب برای تولید گشتاور و سرعت استفاده میشوند. آنها به دلیل سادگی ساختار، قدرت بالا، هزینه کمتر و عملکرد قابل اطمینان، در بسیاری از صنایع مانند خودروسازی، معدن، نفت و گاز، صنایع غذایی و غیره استفاده میشوند. الکتروموتورهای AC انواع مختلفی دارند که شامل الکتروموتورهای القایی (Induction Motors) و الکتروموتورهای سنکرون (Synchronous Motors) میشوند. هر کدام از این انواع الکتروموتورها ویژگیها و کاربردهای خاص خود را دارند.

انواع الکتروموتور AC
الکتروموتور AC به دو دستهی زیر تقسیم میشوند:
- الکتروموتورهای آسنکرون یا القایی
- الکتروموتورهای سنکرون
موتورهای القایی و سنکرون از نظر تولید میدان مغناطیسی روتور تفاوت دارند. اما در موارد دیگر مانند لغزش، تعداد منبع تغذیه، هزینه، راندمان، ضریب قدرت، سرعت، نحوه راه اندازی و کاربرد نیز تفاوت دارند. در صنعت با توجه به عملکرد مناسب و مزایای الکتروموتورهای القایی نسبت به سنکرون، موتورهای القایی کاربرد بیشتری دارند.
الکتروموتورهای آسنکرون یا القایی
موتورهای آسنکرون، موتورهایی هستند که با استفاده از جریان متناوب کار میکنند. این موتورها با ایجاد یک میدان مغناطیسی چرخشی در قسمت ثابت موتور (استاتور)، باعث چرخش قسمت متحرک موتور (روتور) میشوند. سرعت چرخش روتور این موتورها همیشه کمتر از سرعت چرخش میدان مغناطیسی استاتور است. این اختلاف سرعت را لغزش میگویند و به عوامل مختلفی مانند بار موتور، فرکانس برق، و تعداد قطبهای موتور بستگی دارد.
موتورهای آسنکرون مزایای زیادی دارند، از جمله:
- قیمت پایین
- طول عمر بالا
- کارکرد بیصدا
- تعمیر و نگهداری آسان
به همین دلیل، این موتورها در کاربردهای مختلفی مانند لوازم خانگی، تجهیزات صنعتی، و وسایل نقلیه استفاده میشوند.

موتور الکتریکی تکفاز
الکتروموتور سنکرون
موتور سنکرون یک موتور AC در حالت پایدار است که چرخش شفت آن با فرکانس جریان ورودی به آن برابر است. موتور سنکرون یک نوع موتور AC است و تعداد کل چرخش های انجام شده توسط شفت این نوع الکتروموتور برابر با عدد صحیح فرکانس جریان اعمال شده است. موتور سنکرون برای کار کردن به جریان القایی متکی نیست.
در این موتورها، برخلاف موتور القایی ، آهنرباهای الكتریكی چند فاز روی استاتور وجود دارد كه یك میدان مغناطیسی چرخشی تولید میکند. در اینجا روتور یک آهن ربا دائمی است که با میدان مغناطیسی چرخان همگام میشود و همزمان با فرکانس جریان اعمال شده بر آن می چرخد.
عملکرد الکتروموتور سنکرون
الکتروموتور سنکرون با ایجاد جریان میدان مغناطیسی هماهنگ با جریان گذرا، باعث تولید گشتاور و چرخش روتور با سرعت ثابت و دقیق میشود. این ویژگیها باعث استفاده الکتروموتور سنکرون در کاربردهایی که نیاز به سرعت ثابت و هماهنگی با فرکانس شبکه دارند، میشود. نحوه کارکرد موتورهای سنکرون بر اثر متقابل میدان مغناطیسی استاتور با میدان مغناطیسی روتور وابسته است.
استاتور شامل تعدادی سیم پیچ که دارای برق سهفاز است. بنابراین ، سیم پیچ استاتور یک میدان مغناطیسی چرخشی بر اساس برق 3 فاز تولید میکنند. منبع تغذیه DC به روتور داده میشود. روتور وارد میدان مغناطیسی چرخشی تولید شده توسط سیمپیچهای استاتور میشود و به صورت همزمان می چرخد. سرعت چرخش موتور سنکرون به فرکانس جریان ورودی به الکتروموتور بستگی دارد. سرعت موتور سنکرون توسط فرکانس جریان اعمال شده کنترل می شود. سرعت یک موتور سنکرون را می توان به این صورت محاسبه کرد.
f = فرکانس جریان AC (هرتز) / p = تعداد کل قطب ها
اگر نیروی گرفته شده از موتور بیشتر از حداکثر نیرو تولید توسط الکتروموتور سنکرون باشد، موتور از حالت همزمان خارج میشود. سیمپیچ 3 فاز استاتور این امکان را فراهم میکنند که جهت چرخش الکتروموتور مشخص شود. در حالی که در سیمپیچ تکفاز، نمیتوان جهت چرخش را بدست آورد و موتور میتواند در هر جهتی شروع به چرخش کند. برای کنترل جهت چرخش در این موتورهای سنکرون، تنظیمات اولیه نیاز است.
کاربرد الکتروموتور سنکرون
موتورهای سنکرون برای ایجاد سرعت مشخص و ثابت استفاده میشوند و میتوان از آنها در کاربردهایی که چرخش با سرعت ثابت مورد نیاز باشد استفاده کرد. این موتورهای خود آغازگر نیستند و در صورت نیاز به موتور خود آغازگر نباید موتورهای سنکرون را انتخاب کرد. بازده در این موتورها نسبت به بیشتر موتورهای AC و DC بالاتر و بیشتر از 90٪ است.
موتورهای سنکرون برای شرایطی که نیاز به موتورهای سرعت پایین و توان بالا مناسب است و بهترین گزینه تولید نیرو برای دستگاههای سنگ شکنها و انواع آسیاب ها است. سرعت این موتورها بدون توجه به بار ثابت باقی میماند و سرعت آنها فقط از طریق VFD قابل تغییر است زیرا جریان ورودی مستقیماً با سرعت خروجی ارتباط دارد.
کارایی این موتورها به اصلاح ناکارآمدی موتورهای القایی کمک میکند و وسیلهای برای تصحیح تلفات توزیع فراهم میکند. این موتورها هم از نظر توانایی تصحیح قدرت و هم از نظر صحت بسیار ارزشمند هستند و گرچه گرانتر و پیچیدهتر از موتور القایی هستند، اما موتورهای سنکرون یکی دیگر از ماشین های قابل استفاده طراحان است.
الکتروموتورها یکی از تجهیزات بسیار پر کاربرد در صنایع مختلف هستند. این تجهیزات صنعتی انرژی الکتریسیته به انرژی مکانیکی تبدیل میکنند و متناسب با جریان برق ورودی، میتوانند به صورت تک فاز یا سهفاز به مدار متصل شوند. در این مقاله تلاش میشود تا جزییات بیشتری در مورد انواع الکتروموتور سه فاز یا موتورهای القایی ارائه گردد. به غیر از چهار نوع اصلی الکتروموتور که در بالا ذکر شد، چندین نوع موتور الکتریکی خاص وجود دارد. این ها عبارتند از:
- موتورهای القایی خطی (LIM)
- موتور پسماندی
- موتور پله ای
- موتور سروو
هر کدام از این موتورها دارای ویژگی های خاصی هستند که با توجه به نیاز صنعت و یا برای استفاده در یک تجهیز خاص توسعه یافتهاند. به عنوان مثال، موتور پسماندی به دلیل ماهیت کوچک و فشرده در ساعتهای مچی استفاده میشود. موتور پسماندی به عنوان یک موتور سنکرون تعریف میشود که دارای روتور استوانه ای است و بر روی تلفات هیسترزیس ناشی از روتور فولاد سخت با قابلیت نگهداری بالا کار میکند. این موتور تکفاز است و روتور آن از مواد فرومغناطیسی با پشتیبانی غیر مغناطیسی روی شفت ساخته شده است. یک موتور پسماندی از پنج جزء اصلی ساخته شده است:
- استاتور
- سیم پیچ استاتور تک فاز
- روتور
- شفت
- سیم پیچ سایه
تقسیم بندی الکتروموتورها از نظر تعداد فاز
خوب است بدانید که الکتروموتورها از نظر تعداد فاز به دو دسته اصلی تقسیم میشوند:
- الکتروموتورهای تک فاز
- الکتروموتورهای سه فاز
تفاوتهای الکتروموتورهای تک فاز و سه فاز
الکتروموتورهای تک فاز و سه فاز از نظر ساختار داخلی و عملکردی دارای تفاوتهایی هستند.
تفاوتهای ساختاری
- الکتروموتورهای تک فاز معمولاً از یک سیمپیچ استاتور و یک سیمپیچ روتور تشکیل شدهاند.
- الکتروموتورهای سه فاز معمولاً از سه سیمپیچ استاتور و یک سیمپیچ روتور تشکیل شدهاند.
تفاوتهای عملکردی
- الکتروموتورهای تک فاز برای ایجاد گشتاور به یک راهانداز نیاز دارند.
- الکتروموتورهای سه فاز بدون نیاز به راهانداز میتوانند شروع به کار کنند.
کاربردها
- الکتروموتورهای تک فاز در کاربردهای مختلفی مانند لوازم خانگی، تجهیزات کوچک صنعتی، و وسایل نقلیه کوچک استفاده میشوند.
- الکتروموتورهای سه فاز در کاربردهای مختلفی مانند تجهیزات صنعتی، وسایل نقلیه، و تولید برق استفاده میشوند.
اجزای الکتروموتور
ساختمان موتورهای الکتریکی از دو قسمت ثابت و دوار که به ترتیب به نام های استاتور و روتور معروف هستند، تشکیل است. وظیفه استاتور ایجاد یک میدان مغناطیسی اطراف روتور است. ساختار استاتور از یک سری ورقه های فلزی تشکیل شده است که یک استوانه توخالی فلزی را تشکیل میدهد. درون ورقه های فلزی موجود در استاتور یک سری شیارهایی وجود دارد که در این شیارها سیم پیچ های الکتروموتور جاسازی شده اند که به کلاف نیز معروف است.
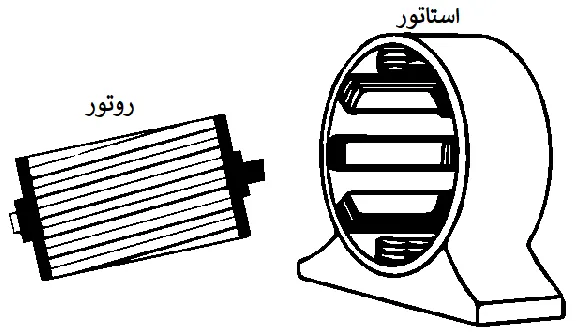
روتور نیز همانند استاتور از دو قسمت هسته و سیم پیچ تشکیل شدهاست که سیمپیچ های اطراف روتور میتواند از جنس مس یا آلومینیوم باشد. جنس هسته رتور معمولا رابطه مستقیمی با قدرت موتور دارد به صورتی که برای موتورهای با قدرت بالا معمولا از قفس مسی و در موتورهای با قدرت کم از قفس آلومینیومی استفاده میشود.
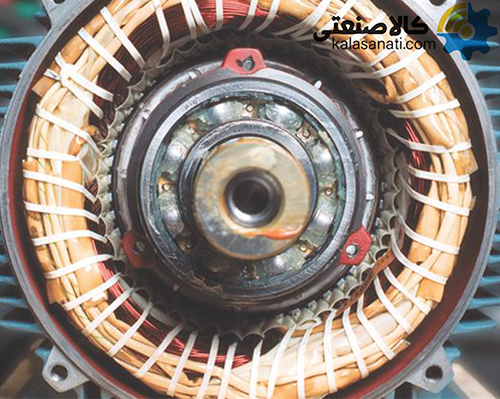
در ساخت سیمپیچ روتور مسی از روش دایکست استفاده میشود، در حالی که در سیم پیچ های آلومینیومی از روش ریخته گری استفاده میشود. روتور موتورهای القایی به دو دسته سیمپیچی شده و قفس سنجابی تقسیم میشود. برای موتورهای بزرگ معمولا از روتور قفس سنجابی با شمش مسی و برای موتورهای کوچک از شمش آلومینیوم استفاده میشود. در عکس زیر میتوانید تمام اجزای الکتروموتور را مشاهده کنید.
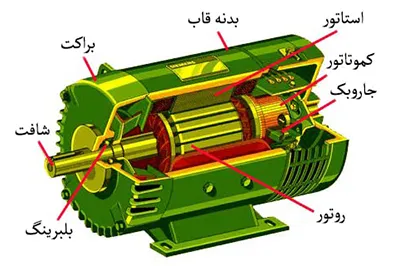
- استاتور: یک قطعه ثابت در محیط الکتروموتور و زیر پوسته است و معمولاً از تعدادی آهن ربا تشکیل شده است. ممکن است یک آهن ربا دائمی یا ممکن است یک آهنربا الکتریکی باشد. آهنرباهای الکترومغناطیسی دارای سیمپیچ هستند که معمولاً از سیممسی یا آلومینیومی ساخته شدهاست.
- روتور: روتور یا همان آرمیچر قطعه حامل جریان است که در مرکز موتور الکتریکی قرار دارد و زمانی که تحت تاثیر میدان مغناطیسی قرار میگیرد و سیمپیچ برای ایجاد گشتاور مکانیکی در تعامل است و چرخش شفت را ایجاد میکند.
- بدنه یا قاب: پوششی است که تمام اجزای موتور را در بر میگیرد و نقش حفاظتی دارد.
- شفت: قطعه ای فلزی که در امتداد روتور از الکتروموتور بیرون است و مصرف کننده به آن متصل میشود.
- کموتاتور: این قطعه نیز در امتداد استاتور و نزدیک به پروانه خنک کننده است، این قطعه جهت جریان را تغییر می دهد و یکی از قطعات متحرک در موتورهای الکتریکی به شمار میرود.
- جاروبک: قطعهای است که با کموتاتور در تماس است و برای تکمیل سوئیچ و تغییر جریان استفاده میشود.
- بلبرینگها: یاتاقانهای یک موتور الکتریکی در نزدیکی نقطهای قرار دارند که امتداد روتور از قاب و بدنه خارج میشود و بر روی براکتها قرار میگیرد. بلبرینگ اجازه میدهد تا شفت با حداقل اصطکاک بچرخد و حرکت ناخواسته را از بین میبرد.
- براکت: براکت در قسمت انتها و ابتدای پوسته متصل شدهاست، شفت الکتروموتور بر روی براکتها سوار است و وسیلهای برای ایمن سازی دستگاه و محل عبور شفت است.
کاربردهای الکتروموتور
امروزه الکتروموتور به همراه گیربکس صنعتی و پمپ کاربردهای فراوانی در صنایع مختلف مانند ساختمان و کشاورزی دارند. به عنوان مثال در صنایعی مثل پتروشیمی و سیمان، کارخانههای مختلف مواد غذایی، صنایع پوشاک، ساختمان، ابزارهای قدرتی و سرعتی و چندین کاربرد مختلف دیگر مورد استفاده هستند. از دیگر کاربردهای آن میتوان در دمندهها، فنها، ماشین آلات صنعتی، پمپها، توربینها، ابزارهای برقی (دریل، اره برقی و ...) دینام، کمپرسورها، کشتیها، محرکها و به طور کلی هر کجا حرکت مکانیکی نیاز است اشاره کرد. موتور الکتریکی یک وسیله ضروری در کاربردهای مختلف مانند تجهیزات تهویه و خنک کننده با تهویه مطبوع HVAC ، لوازم خانگی و وسایل نقلیه موتوری است.
برای استعلام از قیمت به روز انواع قطعات صنعتی از جمله گیربکس صنعتی و قیمت پمپ با کارشناسان ما در تماس باشید.
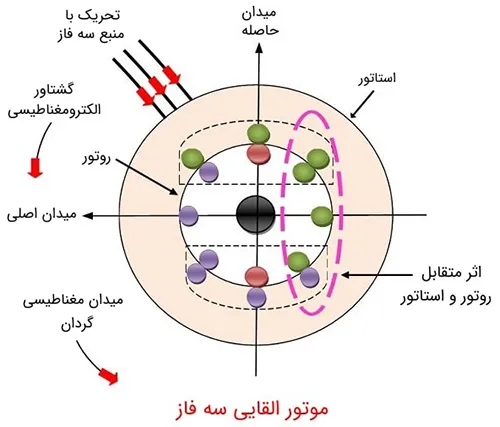
نحوه کار موتورهای القایی
در هنگام عبور جریان سهفاز از استاتور یک میدان مغناطیسی دوار داخل استاتور ایجاد میشود. جهت میدان به وجود آمده در سیمپیچ با توجه به قانون دست راست به دست میآید. چرخش دو قطب یک آهنربا با سرعت زاویهای مشخص موجب القا جریان و ولتاژ مورد نظر در روتور میشود. در داخل روتور ورقههای مغناطیسی وجود دارد که به انتقال بهتر میدان مغناطیسی کمک میکنند. پس از القای مغناطیسی روتور در جهت میدان اصلی شروع به گردش کرده و متناسب با سرعت چرخش، گشتاور ایجاد میکند.
پس از تولید گشتاور توسط روتور، سرعت چرخش این تجهیز بالا رفته تا به نزدیکی سرعت چرخش میدان مغناطیسی (سرعت سنکرون) برسد. موتورهای القایی سه فاز براساس اصول میدان گردان کار میکنند. خطوط شار الکتریکی در فواصل هوایی به شکل شعاعی هستند. اندازه میدان مغناطیسی در فاصله هوایی یکسان ثابت است.
تئوری میدان گردان
سیم پیچ های هر فاز در موتورهای القایی سه فاز دارای اختلاف فاز 120 درجه ای هستند که دلیل آن استفاده از جریان برق سه فاز در این موتور ها می باشد. اختلاف فاز موجود در سیم پیچ ها موجب چرخش موتور در جهت میدان مغناطیسی سیم پیچ می شود که این موضوع نیاز به راه انداز را در این موتورها از بین می برد. برای تغییر جهت چرخش موتور کافیست فازهای موجود در دو سیم پیچ را تغییر دهیم.
پارامترهای موثر بر موتور القایی
آزمایشات بی باری، روتور قفل شده و مقاومتی از جمله روش های محاسبه پارامترهای موثر بر موتورهای القایی سه فاز هستند. از جمله عوامل موثر بر سرعت موتورهای القایی، فرکانس برق شبکه می باشد. با توجه به رابطه عکس فرکانس با زمان می توان نتیجه گرفت که با افزایش فرکانس، سرعت دورانی نیز افزایش می یابد. یکی دیگر از پارامترهای موثر در سرعت چرخش موتور القایی تعداد قطب های استاتور است. طبق مطالعات انجام شده افزایش تعداد قطب های استاتور موجب کاهش سرعت چرخش موتور القایی می شود.
توان و گشتاور در موتور القایی
در موتورهای القایی دو نوع توان تعریف میشود که عبارتند از:
1) توان فاصله هوایی: میزان توانی که از استاتور عبور کرده و به فاصله هوایی می رسد.
2) توان مکانیکی: حاصل تفریق توان فاصله هوایی از تلفات اهمی روتور را توان مکانیکی مینامند.
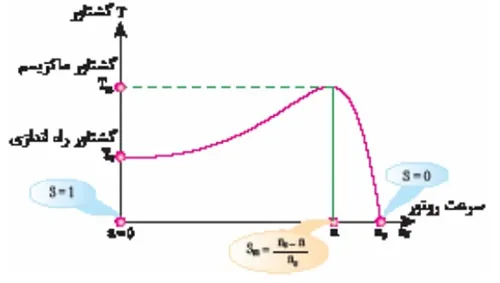
ω_r : سرعت چرخش موتور، S: لغزش موتور. گشتاور یکی از مهمترین پارامترهای موتورهای القایی می باشد. از جمله عواملی که بر روی گشتاور این موتورها اثر گذار است اندازه میدان های استاتور و روتور و اختلاف فاز بین این دو می باشد. موتورهای القایی سه فاز دارای دو مدل گشتاور هستند. این دو مدل عبارتند از گشتاور نامی(T_m) و گشتاور راه اندازی (T_s).
گشتاور نامی به به حداکثر گشتاوری که موتور می تواند به آن میل کند، گفته می شود. گشتاور راه اندازی به میزان گشتاوری که موتور در هنگام شروع کار نیاز دارد، گفته می شود. در منحنی گشتاور-سرعت اگر شیب منحنی مثبت باشد، سیستم ناپایدار است و بالعکس اگر شیب منحنی منفی باشد سیستم پایدار است.
استاندارد موتورهای صنعتی
استانداردهای بسیار زیاد و گوناگونی در کل دنیا وجود دارد که برای تبیین کاربری ها و پارامترهای ساختمانی یک موتور مورد استفاده قرار میگیرد. دو نوع از این استاندارد که بیشتر از بقیه کاربرد دارد عبارت است از:
- NEMA: که مخفف عبارت National Electrical Manufacturers Association (انجمن ملی سازندگان الکتریکی)
- IEC: که مخفف عبارت International Electrotechnical Commission (کمیته بین المللی الکتروتکنیکی) است.
این اتحادیه در سال 1926 دایر شده است که دفتر اصلی آن در واشنگتن آمریکا واقع شده است. NEMA تا این لحظه 500 استاندارد راهنماهای کاربردی و برگه های فنی منتشر کرده است.
NEMA
از استاندارد NEMA در آمریکای شمالی که به وسیله اتحادیه ملی سازندگان وسایل الکتریکی تنظیم شده است استفاده میکنند. علاوه بر این استاندارد NEMA MG1 استانداردی است که در رابطه با دینامهای القایی میباشد.
قسمت های مختلف NEMA
- قسمت سیستمهای ساختمانی
- بخش الکترونیک
- قسمت اتوماسیون صنعتی
- قسمت روشنایی
- قسمت سیم و کابل
- قسمت تصویربرداری امنیتی و ارتباطات
- قسمت عایق گذاری
- قسمت فناوریهای نوظهور
IEC
یکی از سازمانهای واقع در اروپا است که برای موتور ها استانداردهای الکتریکی و مکانیکی را در سرتاسر جهان منتشر میکند. در اغلب کشورها دینامهای مورد استفاده با استاندارد IEC شناخته میشوند.
استانداردهای NEMA برای دینام های القایی
به صورت کلی استاندارد های NEMA چهار نوع طراحی را برای دینام های القایی AC تعریف میکند. (A-B-C-D)
- طرح A: گشتاور شروع طبیعی (بین 150 تا 170 ) و همچنین جریان شروع تقریبا زیادی دارد. در بین همه طرح های NEMA بیشترین گشتاور شکست را دارد که الکتروموتور توانایی آن را پیدا میکند تا برای مدت زمان کوتاهی با اضافه بارهای سنگین برای مدتی کوتاه سروکار داشته باشد.
- طرح B: عادیترین نوع مدل دینام القایی AC است که عرضه میشود. مانند طرح A گشتاور شروعی طبیعی داشته ولی جریان استارتی پایین دارد.
- طرح C: قابل استفاده در بارهایی با شروع بکار سریع و ناگهانی البته با گشتاور شروعی یا همان استارتی بالا (بالاتر از دو نوع قبلی، 200 درصد اسم) مثل نقالهها خرد کنندهها، دستگاههای پرتحرک همزن و پمپ دو طرفه و کمپرسورها است.
- طرح D: گشتاور زیادی ( زیادتر از همه مدلهای NEMA ) دارد. در این طرح جریان شروع و سرعت ظرفیت تکمیل در آن پایین است.
طریقه خواندن پلاک الکتروموتورهای القایی تحت استاندارد NEMA
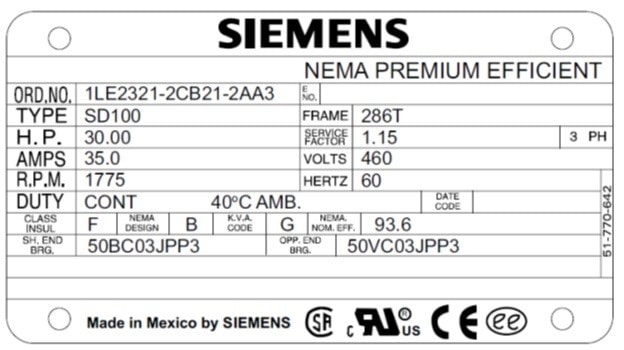
پلاک دینام اطلاعات مفید و کاربردی برای استفاده درست از دینام را برای ما تامین میکند.برای نمونه تصویر زیر پلاک نامی دینام 30 اسب سه فاز را نمایش میدهد.
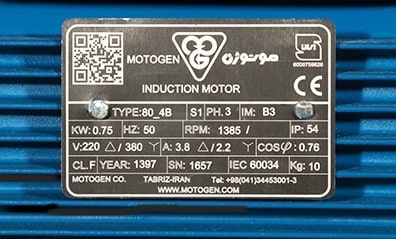
RPM (سرعت نامی) و HZ (فرکانس)
RPM سرعتی است که بر حسب دور بر دقیقه که در این سرعت دینام توان نامی را در ولتاژ و فرکانس نامی را تحویل بار میدهد. منظور از سرعت نامی این است که در زمانی که بار کامل بر روی شفت خروجی که تجهیزات دوار متصل به آن را میچرخاند قرار دارد، با چه سرعتی میچرخد. فرکانس نامی این موتور 60 هرتز و سرعت نامی آن 1775RPM است.
ضریب سرویس (service factor)
این ضریب در واقع یک عدد است که ضرب در توان نامی میشود و بیان کننده حداکثر توانی است که دینام با وجود آن بار میتواند کار کند. با توجه به این دینامهایی دارای ضریب سرویس 1،0 هستند که فقط برای کارکرد در توان کمتر از توان نامی خود طراحی شده است.
کلاس عایقی
کلاسهای عایقی گوناگونی را استاندارد NEMA برای بیان توانایی عایق بندی دینام در مقابل دمای تولید شده در دینام مشخص کرده است. که در 4 کلاس A،H،F،B تعریف میشوند. در هر 4 کلاس دمای پیش بینی شده، افزایش دما از دمای محیط 40 درجه سانتیگراد است. معمول ترین کلاس های عایقی کلاس های F و B هستند.
- Style: کد مربوط به مشخصات الکتریکی و مکانیکی دینام که به وسیله کارخانه سازنده در نظر گرفته میشود.
- Frame: مشخصه ای است که دینام به وسیله آن توسط انجمن ملی تولیدکنندگان شناسایی می شود.
- Time: حداکثر مدت کار دینام را بدون افزایش دمای بدنه دینام از دمای مجاز بیان میکند.
- Type: کد موجود در این قسمت ساختمان و نوع دینام را نشان میدهد. مثلا دینام با خازن راه اندازی میشود یا خیر.
- Hp: توان خروجی دینام را به اسب بخار (یا توان خروجی را به وات و کیلو وات) بیان میکند.
- Volts یا V: ولتاژ نامی دینام را نشان میدهد. که نشان میدهد نحوه راهاندازی دینام میبایست به صورت ستاره، مثلث یا ستاره مثلث باشد.
نتیجه گیری: الکتروموتورها از جمله تجهیزات پر کاربرد در انواع صنایع هستند. برخی از موارد استفاده از این دستگاهها از حساسیت بالایی برخوردار هستند؛ به عنوان مثال در صنایع شیمیایی یا نفت و گاز، کوچکترین جرقه ممکن است به حوادث فجیعی منجر شود. به همین علت برای کاربردها و دستگاههای مختلف، استانداردها و دستورالعملهایی آماده شده که ایمنی دستگاه و کاربر، عملکرد بهینه و عمر مفید طولانی آنها حفظ شود.
برای انتخاب الکتروموتور پارامترهایی مختلفی را باید در نظر گرفت و کارشناسان کالا صنعتی آمادگی ارائه مشاوره تخصصی در زمینه انتخاب، خرید، نصب، راه اندازی و تعمیر و نگهداری انواع الکتروموتور را دارند؛ با ما در ارتباط باشید.
فروش اینترنتی الکتروموتور
یکی از راههای تامین الکتروموتور مورد نیاز کارخانهها و مجموعههای صنعتی فروش اینترنتی الکتروموتور است که طرفداران خود را دارد. از جمله مزایا و معایب آن میتوان به موارد زیر اشاره کرد:
مزایای فروش اینترنتی الکتروموتور
- سهولت خرید
- دسترسی به تخفیفهای دورهای و مقایسه قیمت الکتروموتور در فروشگاههای مختلف
- دریافت اطلاعات دقیق و حرفهای
معایب فروش اینترنتی الکتروموتور
- عدم رویت محصول از نزدیک
- تعداد زیاد فروشگاههای غیر تخصصی
جهت سفارش و خرید و فروش آنلاین و همچنین دینام ارزان میتوانید با کارشناسان ما در تماس باشید.
کدام برند الکتروموتور را بخریم؟
در حال حاضر الکتروموتور در برندهای مختلف مانند الکتروموتور الکتروژن، الکتروموتور موتوژن، الکتروموتور زیمنس، الکتروموتور وگ، الکتروموتور کاجیلی و الکتروموتور ارسم در بازار موجود است. در توانهای بالا اگر مشتری به دنبال برندهای اروپایی باشد، برندهای زیمنس و وگ گزینههای مناسبی برای خرید هستند؛ در عین حال برندهای ایرانی موتوژن و جمکو در توانهای بالا الکتروموتورهای باکیفیتی تولید میکنند.
در میان محصولات صنعتی، برند الکتروموتور موتوژن بهدلیل دوام بالا و قیمت مناسب در صنایع مختلف از جمله پمپسازی و تهویه کاربرد فراوان دارد. از سوی دیگر، الکتروموتور زیمنس بهعنوان یکی از برندهای مطرح اروپایی، با راندمان بالا و طول عمر زیاد، برای کاربریهای سنگین توصیه میشود. برند الکتروموتور وگ نیز با طراحی مهندسی دقیق و بهرهوری بالا، در پروژههای صنعتی و کارخانهای استفاده گستردهای دارد. در کنار این برندها، الکتروموتور ارسم با تکیه بر فناوری روز و کیفیت قابل قبول، یکی از گزینههای محبوب میان مصرفکنندگان داخلی است.
در توانهای معمول و متوسط، الکتروموتورهای ایرانی مانند موتوژن و الکتروژن پیشنهاد مناسبی برای خریداران هستند. همچنین برند چینی کایجیلی نیز در بازار موجود است و کیفیت سیمپیچ خوبی دارد. اگر به دنبال الکتروموتور با قیمت ارزان و مقرونبهصرفه هستید، برندهای الکتروموتور ایدهآل، الکتروموتور ایمپکس و jm.co پیشنهاد میشود. همچنین خدمات پس از فروش و پاسخ به سوالات فنی شما بعد از خرید، توسط کارشناسان با تجربه و حرفهای کالاصنعتی انجام میشود. برای خرید انواع الکتروموتور میتوانید به سایت کالاصنعتی مراجعه کنید یا با کارشناسان فروش تماس بگیرید.

خرید الکتروموتور
برای خرید الکتروموتور، ابتدا باید نیاز خود را برای استفاده از آن مشخص کنید. برای مثال، اگر قصد دارید الکتروموتور را برای کارهای خانگی یا کوچک داشته باشید، ممکن است بتوانید از موتورهای کوچکتر و با توان کمتر استفاده کنید. اما اگر قصد دارید از آن برای کارهای صنعتی و سنگین استفاده کنید، به توان و قدرت بیشتری نیاز دارید.
برای خرید بهترین الکتروموتور، بهتر است قبل از خرید، اطلاعات لازم را درباره آن جمعآوری کنید و با توجه به نیاز خود، از فروشندگان اطلاعات بیشتری درباره مدلها، برندها، توانها و امکانات مختلف موتورها دریافت کنید. از جمله مهمترین پارامترهای تاثیر گذار در خرید الکتروموتور میتوان به موارد زیر اشاره داشت:
خرید الکتروموتور بر اساس توان
توان یک مشخصه بسیار مهم برای انتخاب الکتروموتور است که ابعاد الکتروموتور را برای استفاده و کاربریهای مختلف تعیین میکند. قدرت و سرعت الکتروموتور باید برای استفاده مورد نظر مطابقت داشته باشند. دستهبندی الکتروموتور بر اساس توان مصرفی به طور کلی به سه دسته تقسیم میشود:
- موتور کوچک (0.05 تا 1 اسب بخار)
- موتور متوسط (1 تا 400 اسب بخار)
- الکتروموتور بزرگ (400 تا 50000 اسب بخار)
خرید الکتروموتور بر اساس سرعت
سرعت دینام باید متناسب با مقدار بار اعمالی به آن باشد. سرعت نامی، سرعتی است که موتور هنگام بارگیری کامل کار میکند و با ولتاژ نامی تامین میشود. بیشتر سرعتها در الکتروموتور برای فرکانس 50 هرتز عبارتند از:
- الکتروموتور 3000 دور در دقیقه (دو قطب)
- الکتروموتور 1500 دور در دقیقه (چهار قطب)
- 1000 دور در دقیقه (شش شش قطب)
هنگامی که سرعت موتور و سرعت مورد نیاز تجهیزات متصل به آن یکسان باشد به صورت مستقیم به هم کوپل میشوند. اما در شرایطی که سرعت مورد نیاز برابر نباشد از تجهیزاتی مانند گیربکس، زنجیر یا تسمه بین موتور و تجهیزات مورد نظر برای تنظیم سرعت استفاده میشود.
خرید الکتروموتور بر اساس ولتاژ و فرکانس
مکانی که از الکتروموتور استفاده میشود ولتاژ و فرکانس مورد نیاز را تعیین میکند. ولتاژ تغذیه میتواند یک یا سه فاز باشد. معمولاً در ایران موتورهای سهفاز ساخته شده در ولتاژ دوگانه 230/460 ولت، با فرکانس 50 هرتز باشد. که البته میتوان با استفاده از دستگاههایی مانند اینورتر فرکانس را تغییر داد تا به سرعت دور شافت دلخواه رسید. در ادامه جدول در رابطه با فرکانس و سرعت ارائه می شود.
| سرعت(rpm) |
قدرت |
| 750 |
1000 |
1500 |
3000 |
| گشتاور(Nm) |
کیلووات (KW) |
اسب بخار(HP) |
| 9.55 |
7.16 |
4.77 |
2.39 |
0.75 |
1 |
| 14 |
10.5 |
7 |
3.5 |
1.1 |
1.5 |
| 19.1 |
14.3 |
9.55 |
4.77 |
1.5 |
2 |
| 28 |
21 |
14 |
7 |
2.2 |
3 |
| 47.1 |
35.3 |
23.6 |
11.8 |
3.7 |
5 |
| 71.3 |
53.5 |
35.6 |
17.8 |
5.6 |
7.5 |
| 95.5 |
71.6 |
47.7 |
23.9 |
7.5 |
10 |
| 140 |
105 |
70 |
35 |
11 |
15 |
| 191 |
143 |
95.5 |
47.7 |
15 |
20 |
| 242 |
181 |
121 |
60.5 |
19 |
25 |
| 280 |
210 |
140 |
70 |
22 |
30 |
| 382 |
286 |
191 |
95.5 |
30 |
40 |
| 471 |
353 |
236 |
118 |
37 |
50 |
| 573 |
730 |
286 |
143 |
45 |
60 |
| 662 |
497 |
331 |
166 |
52 |
70 |
| 764 |
573 |
382 |
191 |
60 |
80 |
| 853 |
640 |
427 |
213 |
67 |
90 |
| 955 |
716 |
477 |
239 |
75 |
100 |
| 1184 |
888 |
592 |
296 |
93 |
125 |
| 1426 |
1069 |
713 |
356 |
112 |
150 |
| 1668 |
1251 |
834 |
417 |
131 |
175 |
| 1897 |
1423 |
949 |
474 |
149 |
200 |
| 2139 |
1604 |
1069 |
535 |
168 |
225 |
| 2381 |
1786 |
1190 |
595 |
187 |
250 |
| 2610 |
1958 |
1305 |
653 |
205 |
275 |
| 2852 |
2139 |
1426 |
713 |
224 |
300 |
| 3323 |
2492 |
1662 |
831 |
261 |
350 |
| 3794 |
2846 |
1897 |
949 |
298 |
400 |
| 4278 |
3208 |
2139 |
1069 |
336 |
450 |
| 5220 |
3915 |
2610 |
1305 |
410 |
550 |
| 5704 |
4278 |
2852 |
1426 |
448 |
600 |
خرید بر اساس اندازه فریم و قاب
قدرت و سرعت الکتروموتور ابعاد فریم را تعیین میکنند. اندازه فریم در حقیقت فاصله مرکز شفت خروجی الکتروموتور تا زیر پایه است. این اطلاعات برای نصب موتور لازم است.که در جدول زیر نسبت ابعاد فریم و شفت نسبت به قدرت و سرعت نمایش داده شده است.
| تعداد قطب ها |
فرکانس(HZ) |
| 8 |
6 |
4 |
2 |
| سرعت(rpm) |
| 150 |
200 |
300 |
600 |
10 |
| 300 |
400 |
600 |
1200 |
20 |
| 450 |
600 |
900 |
1800 |
30 |
| 600 |
800 |
1200 |
2400 |
40 |
| 750 |
1000 |
1500 |
3000 |
50 |
| 900 |
1200 |
1800 |
3600 |
60 |
| 1050 |
1400 |
2100 |
4200 |
70 |
| 1200 |
1600 |
2400 |
4800 |
80 |
| 1350 |
1800 |
2700 |
5400 |
90 |
| 1500 |
2000 |
3000 |
6000 |
100 |
خرید بر اساس نوع محفظه الکتروموتور
محفظه یا فریم موتور نه تنها اجزا را در کنار هم نگه میدارد، بلکه از اجزای داخلی در برابر رطوبت و آلودگیها محافظت میکند. میزان حفاظت و خنک شدن موتور به نوع محفظه بستگی دارد. محفظههای الکتروموتور دارای دو دسته بندی کلی هستند که عبارتند از:
- موتور محفظه باز (open)
- موتور محفظه بسته (closed)
یک محفظه الکتروموتور خوب از گرد و غبار ، روغن ، آب و مایعات فشار بالا محافظت میکند تا موتور بتواند در محیط های خانگی صنعتی و شرایط محیط سخت مورد استفاده قرار بگیرد. در ادامه به دسته بندی نوع محفظه الکتروموتور بر اساس استاندارد NEMA خواهیم پرداخت و هر کدام از این عباراتها را توضیح خواهیم داد.
| سرعت(rpm) |
قدرت |
| 750 |
100 |
1500 |
3000 |
کیلو وات(KW) |
اسب بخار(HP) |
| شفت |
فریم |
شفت |
فریم |
شفت |
فریم |
شفت |
فریم |
| - |
- |
- |
- |
9 |
56 |
- |
- |
0.06 |
0.08 |
| - |
- |
- |
- |
9 |
56 |
9 |
56 |
0.09 |
0.12 |
| - |
- |
- |
- |
11 |
63 |
9 |
56 |
0.12 |
0.16 |
| - |
- |
- |
- |
11 |
63 |
11 |
63 |
0.18 |
0.25 |
| - |
- |
- |
- |
14 |
71 |
11 |
63 |
0.25 |
0.34 |
| 24 |
90 |
19 |
80 |
14 |
71 |
14 |
71 |
0.37 |
0.5 |
| - |
- |
19 |
80 |
19 |
80 |
14 |
71 |
0.55 |
0.75 |
| 28 |
100 |
24 |
90 |
19 |
80 |
19 |
80 |
0.75 |
1 |
| 28 |
100 |
24 |
90 |
24 |
90 |
19 |
80 |
1.1 |
1.5 |
| 28 |
112 |
28 |
100 |
24 |
90 |
24 |
90 |
1.5 |
2 |
| 38 |
132 |
28 |
112 |
28 |
100 |
24 |
90 |
2.2 |
3 |
| 38 |
132 |
38 |
132 |
28 |
100 |
28 |
100 |
3 |
4 |
| 42 |
160 |
38 |
132 |
28 |
112 |
28 |
112 |
4 |
5.5 |
| 42 |
160 |
38 |
132 |
38 |
132 |
38 |
132 |
5.5 |
7.5 |
| 42 |
160 |
42 |
160 |
38 |
132 |
38 |
132 |
7.5 |
10 |
| 48 |
180 |
42 |
160 |
42 |
160 |
42 |
160 |
11 |
15 |
| 55 |
200 |
48 |
180 |
42 |
160 |
42 |
160 |
15 |
20 |
| 60 |
225 |
55 |
200 |
48 |
180 |
42 |
160 |
18.5 |
25 |
| 60 |
225 |
55 |
200 |
48 |
180 |
48 |
180 |
22 |
30 |
| 65 |
250 |
60 |
225 |
55 |
200 |
55 |
200 |
30 |
40 |
| 75 |
280 |
65 |
250 |
60 |
225 |
55 |
200 |
37 |
50 |
| 75 |
280 |
75 |
280 |
60 |
225 |
60 |
225 |
45 |
60 |
| 80 |
315 |
75 |
280 |
65 |
250 |
65 |
250 |
55 |
75 |
| 80 |
315 |
80 |
315 |
75 |
280 |
75 |
280 |
75 |
100 |
| 80 |
315 |
80 |
315 |
75 |
280 |
75 |
280 |
90 |
125 |
| 80 |
315 |
80 |
315 |
80 |
280 |
80 |
315 |
110 |
150 |
| 95 |
355 |
80 |
315 |
80 |
280 |
80 |
315 |
132 |
180 |
| 95 |
355 |
95 |
355 |
80 |
315 |
80 |
315 |
160 |
220 |
| 95 |
355 |
95 |
355 |
80 |
315 |
80 |
315 |
185 |
255 |
| 95 |
355 |
95 |
355 |
80 |
315 |
80 |
315 |
185 |
255 |
| 95 |
355 |
95 |
355 |
80 |
315 |
80 |
315 |
200 |
275 |
| - |
- |
95 |
355 |
95 |
355 |
90 |
355 |
250 |
350 |
| - |
- |
- |
- |
95 |
355 |
95 |
355 |
315 |
435 |
موتورهای محفظه باز بعنوان الکتروموتور Safe یا معمولی شناخته میشود. یک موتور معمولی به شما امکان میدهد تا هوا از خارج موتور آزادانه در اطراف سیم پیچ گردش کند، در حالی که از ورود قطرههای مایع یا ذرات خارجی به الکتروموتور جلوگیری میکند. این پارامتر با اختصار IP بر روی پلاک الکتروموتور هک میشود که درجه حفاظت این پارامتر در جدول زیر توضیح داده میشود.
| نوع محیط کاری الکتروموتور |
توضیحات |
| ODP |
مناسب برای محیط های بسته تمیز، خشک و با تهویه مناسب |
| TEFC |
قابلیت عملکرد در محیط های کثیف، با گرد و خاک و مرطوب. این نوع موتورها دارای یک فن بیرونی برای جابه جایی هوا و خنک کاری موتور می باشد. |
| TENV |
دارای شرایط مشابه با TEFC با این تفاوت که در این مدل از موتورها از فن استفاده نمی شود و تنها جریان هوای عبوری موجب خنک کاری موتور می شود. |
| TEAO |
برای محیط هایی که هم دارای فن و هم دمنده هوا دارند مناسب می باشد. |
| عدد دوم |
عدد اول |
درجه حفاظت |
نوع محفظه الکتروموتور |
| محافظت در برابر آب |
محافظت در برابر گرد و غبار |
محافظت در برابر تماس تصادفی |
| بدون محافظت |
بدون محافظت |
بدون محافظت |
IP00 |
محفظه باز |
| محافظت در برابر قطرات آب حتی با زاویه عمودی 15 درجه |
بدون محافظت |
بدون محافظت |
IP02 |
محفظه باز |
| محافظت در برابر قطرات عمودی آب |
عدم ورود اجسام جامد به قطر بیش از 50 میلی متر |
محافظت در برابر تماس تصادفی با دست |
IP11 |
محفظه باز |
| محافظت در برابر قطرات آب حتی با زاویه عمودی 15 درجه |
عدم ورود اجسام جامد به قطر بیش از 50 میلی متر |
محافظت در برابر تماس تصادفی با دست |
IP12 |
محفظه باز |
| محافظت در برابر قطرات آب حتی با زاویه عمودی 60 درجه |
عدم ورود اجسام جامد به قطر بیش از 50 میلی متر |
محافظت در برابر تماس تصادفی با دست |
IP13 |
محفظه باز |
| محافظت در برابر قطرات عمودی آب |
عدم ورود اجسام جامد به قطر بیش از 12 میلی متر |
محافظت در برابر تماس تصادفی با انگشت |
IP21 |
محفظه باز |
| محافظت در برابر قطرات آب حتی با زاویه عمودی 15 درجه |
عدم ورود اجسام جامد به قطر بیش از 12 میلی متر |
محافظت در برابر تماس تصادفی با انگشت |
IP22 |
محفظه باز |
| محافظت در برابر قطرات آب حتی با زاویه عمودی 60 درجه |
عدم ورود اجسام جامد به قطر بیش از 12 میلی متر |
محافظت در برابر تماس تصادفی با انگشت |
IP23 |
محفظه باز |
| محافظت در برابر پاشش آب از هر جهتی |
عدم ورود اجسام جامد به قطر بیش از 1 میلی متر |
محافظت در برابر تماس با ابزارآلات |
IP44 |
محفظه بسته |
| محافظت در برابر پاشش آب از هر جهتی |
عدم ورود گرد و غبار مضر |
محافظت در برابر هرگونه تماس |
IP54 |
محفظه بسته |
| محافظت ورود آب حتی با سرعت بالا |
عدم ورود گرد و غبار مضر |
محافظت در برابر هرگونه تماس |
IP55 |
محفظه بسته |
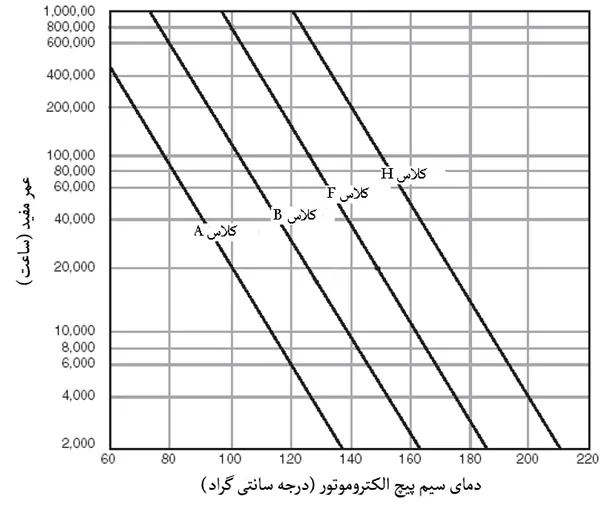
خرید بر اساس کلاس عایق بندی
گرما بزرگترین دشمن موتور است. عمر موتور تا حد زیادی به مقدار افزایش دما سیم پیچها بستگی دارد. هدف اصلی از عایق بندی، محافظت از سیمپیچهای استاتور در برابر گرما است. هرچقدر که الکتروموتور مدت زمان بیشتر با حداکثر دمای برای کلاس عایق کار کند عمر مفید آن کاهش خواهد یافت به عنوان مثال الکتروموتور با کلاس عایق F در صورت 20000 ساعت کار در دمای 155 درجه نیمی از عمر مفید خود را از دست داده است. که در ادامه نمودار مربوط به کلاس های عایقی مختلف رابطه آن با دما و طول عمر مفید دینام قرار داده شده است.
| نام کلاس عایق بندی |
جنس عایق |
حداکثر دما سیم پیچ |
| A |
کتان،ابریشم و کاغذ با پوشش مناسب یا آغشته کردن به مواد ضد الکتریسته مانند روغن |
105 درجه سانتی گراد |
| B |
تلق نسوز،پشم شیشه،پنبه نسوز |
130 درجه سانتی گراد |
| F |
تلق نسوز(میکا)،پشم شیشه،پنبه نسوز |
155 درجه سانتی گراد |
| H |
لاستیک سیلیکونی،تلق نسوز(میکا)،پشم شیشه،پنبه نسوز که با موادی مانند سیلیکون رزین آغشته شده است. |
180 درجه سانتی گراد |
خرید بر اساس راندمان
راندمان موتور بیانگر این موضوع است که دستگاه مورد نظر چه درصدی از برق ورودی را به کار مفید و توان مفید مکانیکی (روی شفت) انتقال میدهد و چه مقداری را به صورت گرما تلف میکند. استاندارد IEC 60034-30-1:2014 چهار دستهبندی برای ساخت الکتروموتور ها از نظر راندمان تعریف کرده است. این دسته بندیها با کدهای مشخصه IE که مخفف International Efficiency است، به صورت زیر تعریف میشوند:
| نماد |
تعریف |
| IE1 |
راندمان استاندارد (Standard) |
| IE2 |
راندمان بالا (High) |
| IE3 |
راندمان عالی (Premium) |
| IE4 |
راندمان فوق عالی (Super premium) |
خرید بر اساس چرخه کار
انتخاب یک موتور الکتریکی مناسب به الگوی توان گرفته شده از آن نیز بستگی دارد، که این چرخه کاری میتواند ثابت یا متغیر در مدت زمان مشخصی باشد، تکرار یک چرخه تغییرات یا بار اعمالی به موتور با گشتاور ضرباندار یا ضربه است. چرخه کاری یک الگوی قدرت گرفته شده در یک دوره زمانی مشخص است و به صورت نسبت زمان به چرخه کار بیان می شود. شروع مکرر باعث کاهش عمر می شود زیرا جریان هجومی هنگام راه اندازی رسانا را به سرعت گرم می کند. چرخه وظیفه نیز عاملی در اندازه موتورهای الکتریکی است.
| سطح |
نام سطح |
توضیحات |
| S1 |
چرخه مداوم |
یک بار ثابت به موتور برای مدت زمان مشخص اعمال میشود برای رسیدن به تعادل زمانی کار می کند. |
| S2 |
چرخه کار کوتاه |
یک بار ثابت برای مدت زمان مشخص به موتور اعمال میشود ولی نه به اندازه ای که به تعادل گرمایی برسد،دوره های زمانی استراحت برای موتور به اندازه ای هست که موتور به دما محیط برسد. |
| S3 |
چرخه کار متناوب |
دوره کاری و استراحت یکسان و متوالی با یک مقدار بار ثابت.موتور هیچوقت به تعادل گرمایی نمیرسد.جریان شروع کار تاثیر کمی بر روی افزایش دما دارد. |
| S4 |
چرخه کار متناوب با شروع به کار |
شروع به کار،مدت زمان کار و مدت زمان استراحت یکسان برای بار اعمالی مشخص، هیچوقت موتور به دمای تعادلی نمیرسد ولی با این حال جریان آغاز به کار موتور بر روی افزایش دما تاثیر دارد. |
| S5 |
چرخه کار متناوب با ترمز الکتریکی |
دوره شروع به کار متناوب و یکسان،بار اعمالی ثابت یا بدون اعمال بار به موتور،بدون داشتن دوره های استراحت برای موتور |
| S6 |
عملکرد مداوم همراه بار متناوب |
دوره کاری متناوب و یکسان همراه با بار مشخص یا بدون اعمال بار به موتور، بدون داشتن دوره های استراحت |
| S7 |
عملکرد مداوم با ترمز الکتریکی |
دوره های شروع به کار یکسان و متناوب،ادامه با مقدار بار اعمالی ثابت همراه با ترمز الکتریکی،بدون داشتن دوره های استراحت |
| S8 |
عملکرد مداوم با تغییر دوره ای در بار و سرعت |
دوره های کاری متناوب و یکسان با بار اعمالی و سرعت مشخص و همینطور، ادامه به کار با سرعت و بار اعمالی متغییر،بدون داشتن دوره استراحت |
خرید بر اساس شرایط محیطی نصب
معمولاً درباره محیط نصب الکتروموتور بایستی یک سری شرایط در نظر گرفته بشود تا عمر قسمتهای مختلف موتور 3 فاز مانند عایق بین سیم پیچها، بلبرینگها، گریس استفادهشده در بلبرینگ و … به حداکثر برسد. مهمترین این شرایط مربوط است به دما، رطوبت، لرزش و ارتفاع و ... در محل نصب. معمولاً قدرت و جریان نامی موتور الکتریکی برای حداکثر دمای 40 ° C و ارتفاع (از سطح دریا) 1000 متر طراحیشده است. اگر شرایط دما و ارتفاع محیط از این مقادیر تجاوز کند، حتماً باید الکترو موتور کمتر از مقدار نامی زیر بار برود. مقادیر و ضرایب طبق دستورالعمل سازنده بایستی اعمال بشود.

خرید اینترنتی الکتروموتور
خرید الکتروموتور نیازمند وقت و تحقیق و بررسی بسیار، بخصوص اگر به دنبال الکتروموتوری با قیمت مناسب یا کارایی خاص هستید دارد. یک الکتروموتور با کیفیت را می توان از مراکز فروش معتبر تهیه کرد. مهم ترین نکته در مورد خرید یک الکتروموتور مشخصات فنی آن مانند موارد زیر می باشد:
- توان الکتروموتور
- ولتاژ و فرکانس
- اندازه فریم و قاب
- نوع محفظه الکتروموتور
- کلاس عایق بندی
- چرخه کار