الکتروموتورهای DC دستهای از ماشینهای الکتریکی هستند که با برق جریان مستقیم (DC) تغذیه میشوند. موتورهای دی سی از میدانهای مغناطیسی ناشی از جریانهای الکتریکی تولید شده استفاده میکنند که باعث حرکت روتور میشود. گشتاور و سرعت خروجی، هم به ولتاژ ورودی و هم به طراحی موتور بستگی دارد. از موتور DC در بسیاری از وسایل مانند اسباب بازیها، دستگاههای رباتیک و اتوماسیون، جرثقیل، بالابر، آسانسور و نیز وسایل نقلیه برقی استفاده میشود. در بیشتر موارد برای تغذیه این دستگاهها از باطری استفاده میشود اما برای توانهای بالا و تغذیه بسیاری از انواع موتور DC صنعتی از اینورتر استفاده میشود.
جایگاه الکتروموتور DC صنعتی با وجود استفاده و رواج بسیار کمتر و توان پایینتر نسبت به الکتروموتور سه فاز، به دلیل مزایایی که دارد قابل جایگزینی نیست. گشتاور راهاندازی بالا در سرعت پایین، امکان کنترل سرعت به راحتی و با تغییر ولتاژ تغذیه، راندمان بالا و ساختار ساده، الکتروموتور DC صنعتی را برای بسیاری از کاربردها مناسب و محبوب کرده است.
جدول لیست قیمت الکتروموتور DC (آپدیت امروز)
توجه: این جدول شامل همه محصولات نیست و تنها شامل قیمت برخی از محصولات پرطرفدار است. برای مشاهده همه محصولات و یا محصول مد نظر خود، به لیست محصولات بالای صفحه مراجعه نمایید.
| نام محصول |
توان (وات) |
ویژگی خاص / نوع |
قیمت |
| الکتروموتور DC با گیربکس بغل |
60 |
گیربکسدار |
تماس بگیرید |
| الکتروموتور DC ساده |
100 |
- |
تماس بگیرید |
| الکتروموتور DC با گیربکس بغل |
100 |
گیربکسدار |
تماس بگیرید |
| الکتروموتور DC ساده |
140 |
- |
تماس بگیرید |
| الکتروموتور DC با گیربکس بغل |
140 |
گیربکسدار |
تماس بگیرید |
| الکتروموتور DC ساده |
190 |
- |
تماس بگیرید |
| الکتروموتور سر درب آسانسور DC |
190 |
مخصوص درب آسانسور |
تماس بگیرید |
| الکتروموتور DC ساده |
250 |
- |
تماس بگیرید |
| الکتروموتور DC ساده |
300 |
- |
تماس بگیرید |
| الکتروموتور DC ساده |
400 |
- |
تماس بگیرید |
| الکتروموتور DC ساده |
500 |
- |
تماس بگیرید |
انواع الکتروموتور DC
موتورهای DC انواع مختلفی دارند و بسته به نوع، در کاربردهای مختلف استفاده میشوند:
- الکتروموتور DC جاروبکدار
- موتورهای DC بدون جاروبک
البته موتورهای DC جاروبکدار، خود به دو نوع موتور DC سری و موتور DC شنت تقسیم میشوند.
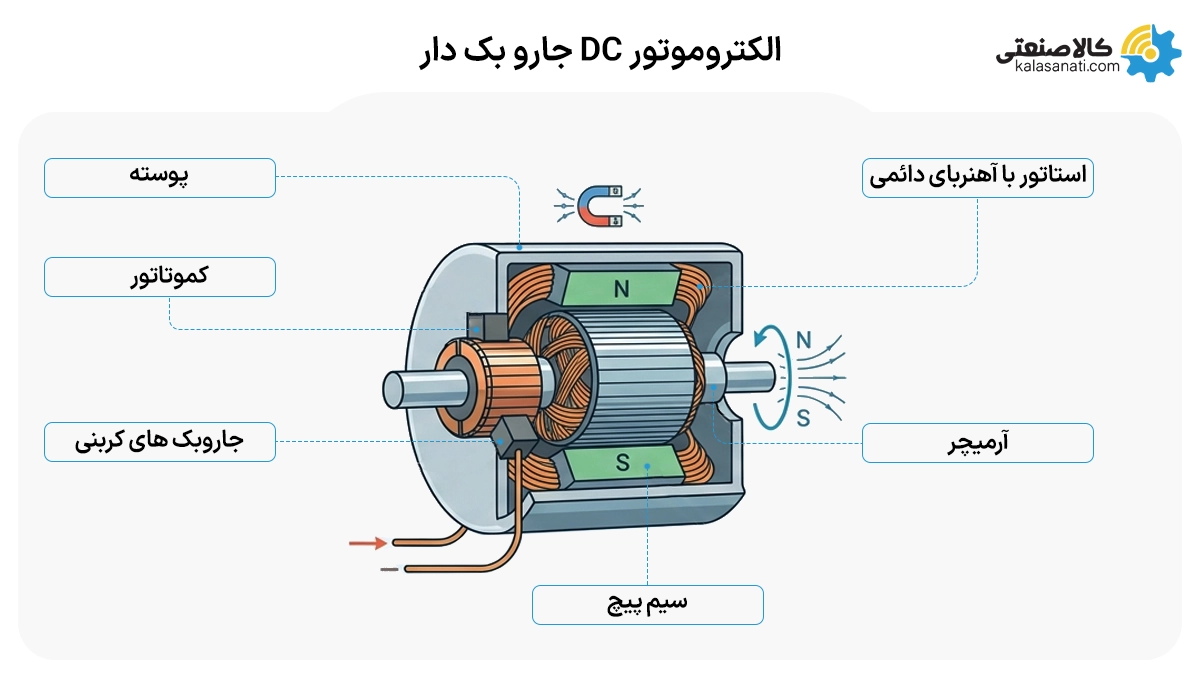
1) موتور DC جاروبکدار
موتور DC جاروبکدار که عادیترین نوع الکتروموتور DC است دارای یک کموتاتور است که جریان را در هر نیم چرخه معکوس، و گشتاور یک جهته ایجاد میکند. با اینکه که الکتروموتورهای DC جاروبکدار برای کاربرد در جرثقیلها، ماشینهای جمعکننده کاغذ و نورد فولاد محبوب هستند ، بسیاری از آنها در سالهای اخیر با مدل کارآمدتر بدون جاروبک جایگزین شدهاند.
- موتور DC شنت (موازی): در موتور DC موازی، سیمپیچهای میدان به موازات روتور وصل میشوند. الکترو موتور DC شنت برای کاربردهایی که نیاز به گشتاور ثابت دارند، استفاده می شود، جایی که بار متناسب با سرعت تغییر نمیکند ، مانند تسمه نقاله ، میکسر و بالابر.
- موتور DC سری: در این نوع الکتروموتور سیمپیچهای میدان به صورت سری با روتور قرار میگیرند؛ در نتیجه کل جریان روتور به سیمپیچ میدان منتقل میشود و سرعت بسیار بیشتری ایجاد میکند. الکتروموتورهای DC سری در مواردی کاربرد دارند که نیاز به گشتاور راهاندازی بالا وجود دارد؛ مانند وینچ، ماشین آلات سنگین و لیفتراک.
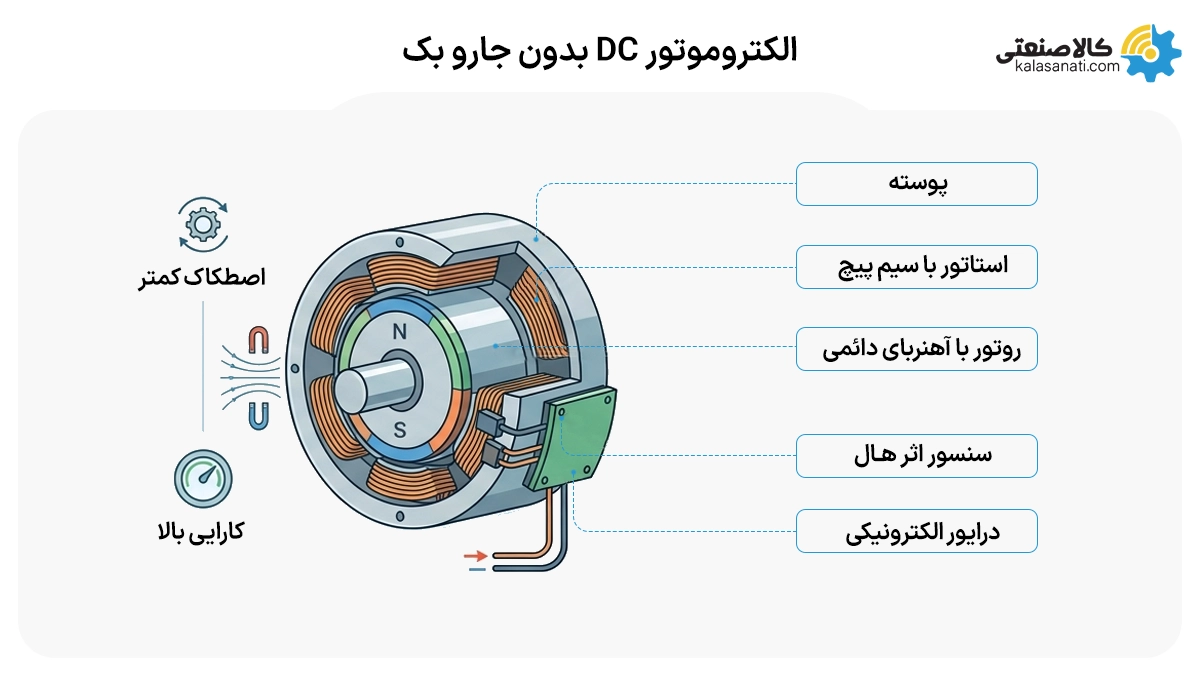
2) موتورهای DC بدون جاروبک
در موتورهای DC بدون جاروبک برای تغییر جهت جریان از یک مکانیسم الکترونیکی استفاده میشود و جاروبک و کموتاتور حذف شدهاند؛ در نتیجه مشکلاتی مانند فرسایش، ساییدگی و جرقه جاروبک در این نوع موتورها دیده نمیشود. در سیستمهای تهویه مطبوع، وسایل نقلیه برقی، سیستمهای رباتیک و اتوماسیون و نیز فن کامپیوتر، از موتورهای DC بدون جاروبک استفاده میشود. با این حال قیمت این موتورها در مقایسه با نوع جاروبکدار بیشتر است.
جدول مشخصات فنی و ویژگی های الکتروموتور DC
در انتخاب الکتروموتور DC، توجه به پارامترهای مکانیکی و الکتریکی برای تطابق با نیاز پروژه الزامی است. مشخصات فنی این موتورها معمولاً شامل موارد زیر در پلاکخوانی میشود:
| پارامتر فنی |
توضیحات و واحد اندازه گیری |
اهمیت در انتخاب |
| ولتاژ ورودی |
12V / 24V / 48V / 110V / 220V DC |
تعیینکننده منبع تغذیه و درایور |
| توان خروجی |
بر حسب KW یا HP (اسب بخار) |
میزان توانایی انجام کار مکانیکی |
| سرعت نامی |
RPM (دور بر دقیقه) |
تعیینکننده سرعت خروجی بدون گیربکس |
| گشتاور (Torque) |
N.m (نیوتن متر) |
قدرت موتور برای غلبه بر بار |
| کلاس عایقی |
Class F / Class H |
مقاومت حرارتی سیمپیچ موتور |
| درجه حفاظت |
IP (مانند IP44 یا IP54) |
میزان مقاومت در برابر رطوبت و گردوغبار |
ویژگیهای کلیدی الکتروموتور DC صنعتی:
اجزای الکتروموتور دی سی (DC)
الکتروموتور DC از سه قسمت اصلی تشکیل میشود:
- استاتور
- روتور
- کموتاتور
- جاروبکها

استاتور
استاتور یک جزء حیاتی در ساختار الکتروموتور DC است که میدان مغناطیسی لازم برای عملکرد آن را تولید میکند. کارایی موتور به شدت به طراحی و ساخت استاتور بستگی دارد. چیدمان سیمپیچهای استاتور و اتصال آنها به منبع تغذیه، بر راندمان الکترو موتور تأثیر زیادی دارد. جنس استاتور نیز اهمیت زیادی دارد. استاتور معمولاً از موادی با نفوذپذیری مغناطیسی بالا برای افزایش قدرت میدان مغناطیسی ساخته شده است. در ساخت استاتور بایستی هسته و سیمپیچها به گونهای جایگذاری و تراز شوند که حداقل اتلاف انرژی را داشته باشد.
آرمیچر
آرمیچر یک قطعه مهم در ساختمان الکترو موتور DC است که انرژی الکتریکی را به حرکت مکانیکی تبدیل میکند. آرمیچرها از یک هسته ساخته شده از ورقههای فلزی نازک و عایق شده تشکیل شدهاند که روی هم چیده میشوند و بدنه آرمیچر را تشکیل میدهند.
سیم پیچی آرمیچر نقش مهمی در تعیین گشتاور، سرعت و عملکرد کلی الکترو موتور دارند. در فرآیند سیمپیچی آرمیچر، سیمهای مسی به دور هسته آرمیچر پیچیده میشوند و هرچه تعداد دورها بیشتر باشد، قدرت میدان مغناطیسی نیز بیشتر میشود. تعداد سیم پیچها، قطر سیم و الگوی سیم پیچ، به طور قابل توجهی بر ویژگیهای الکترو موتور تأثیر میگذارد.
کموتاتور
کموتاتور یکی دیگر از بخشهای مهم در موتورهای DC است که برای اطمینان از جریان مداوم جریان الکتریکی در سیمپیچهای آرمیچر عمل میکند. نقش اصلی آن شامل معکوس کردن جهت جریان در سیمپیچهای آرمیچر است که به روتور اجازه میدهد چرخش خود را حفظ کند. کموتاتورها معمولاً از قطعات مسی عایق شده از یکدیگر ساخته می شوند و روی محور روتور نصب میشوند.
جاروبکها
وظیفه جاروبکها ایجاد تماس الکتریکی بین بخشهای کموتاتور و انتقال جریان در الکتروموتور DC است. جاروبکها (برسها) به دلیل خاصیت روانکاری، اصطکاک کم و توانایی مقاومت در برابر دماهای بالا، معمولا از جنس کربن یا گرافیت ساخته میشوند. بازرسی منظم، سلامتی، تمیز نگه داشتن و زدودن گرد و غبار از جاروبکها برای جلوگیری از مشکلات عملکردی و تضمین طول عمر و راندمان موتور بسیار ضروری است.
عملکرد الکتروموتور DC
در الکتروموتور DC، یک آهنربای ثابت به نام استاتور وجود دارد که یک میدان مغناطیسی ایجاد میکند. در مرکز استاتور، آرمیچر قرار دارد که از یک هسته سیمپیچی شده تشکیل شده و جریان الکتریکی DC از آن عبور میکند. عبور جریان از این سیمپیچ، باعث ایجاد یک میدان مغناطیسی در اطراف آن میشود.
از برهمکنش این میدان مغناطیسی با میدان مغناطیسی استاتور، نیرویی ایجاد میشود که گشتاور لازم برای به حرکت درآوردن آرمیچر را ایجاد میکند. برای ادامه این روند و چرخش مداوم آرمیچر، قطعهای به نام کموتاتور جهت جریان را معکوس میکند. مقدار کل جریانی که به سیمپیچها فرستاده میشود و نیز اندازه و تعداد دور سیم پیچها، در میزان قدرت میدان نیروی الکترومغناطیسی تولید شده تاثیرگذار است.

مزایا و معایب الکتروموتور DC
| مزایای موتور DC |
معایب موتور DC |
| گشتاور راهاندازی بالا |
قیمت بالاتر نسبت به موتور AC |
| دقت بالا در کنترل سرعت روتور |
راندمان پایین در سرعتهای بالا |
| چرخش معکوس با تعویض قطبهای تغذیه |
نیاز به جریان تغذیه DC |
| راهاندازی و کنترل آسان در مقایسه با موتور AC |
توان خروجی محدود در مقایسه با موتورهای AC |
راهنمای خرید الکتروموتور DC و عوامل موثر بر قیمت
خرید الکتروموتور DC نیازمند بررسی دقیق شرایط کاری است. اشتباه در انتخاب ولتاژ یا توان، منجر به آسیب به درایور یا سوختن سیمپیچ میشود.
نکات حیاتی هنگام خرید:
- نوع تغذیه: بررسی کنید که آیا منبع تغذیه شما (باتری یا سوییچینگ) توانایی تامین جریان استارت موتور را دارد یا خیر.
- دائم کار بودن (Duty Cycle): اگر موتور باید به صورت مداوم روشن باشد، حتماً مدلهای با کلاس حرارتی بالا و سیستم خنککاری مناسب انتخاب کنید.
- نوع آهنربا: موتورهای با آهنربای نئودیمیوم قیمت بالاتری دارند اما حجم کمتر و بازدهی بیشتری ارائه میدهند.
- قابلیت نصب گیربکس: در صورت نیاز به دور بسیار پایین و گشتاور بسیار بالا، حتماً امکان کوپل شدن موتور با گیربکس صنعتی را بررسی کنید.
عوامل موثر بر قیمت الکتروموتور DC عبارتند از:
- توان و گشتاور: با افزایش ظرفیت خروجی، مقدار مس مصرفی و حجم آهنربا افزایش یافته و قیمت بالا میرود.
- تکنولوژی ساخت: موتورهای Brushless (بدون زغال) به دلیل حذف اصطکاک و استفاده از سنسورهای اثر هال، قیمت بیشتری نسبت به مدلهای معمولی دارند.
- برند سازنده: برندهای معتبر اروپایی و چینی درجه یک (مانند ZHENG) به دلیل طول عمر بلبرینگ و کیفیت جاروبکها، قیمت بالاتری دارند.
- درجه حفاظت (IP): مدلهای ضد آب یا ضد گردوغبار به دلیل آببندی خاص، گرانتر از مدلهای Open Frame هستند.